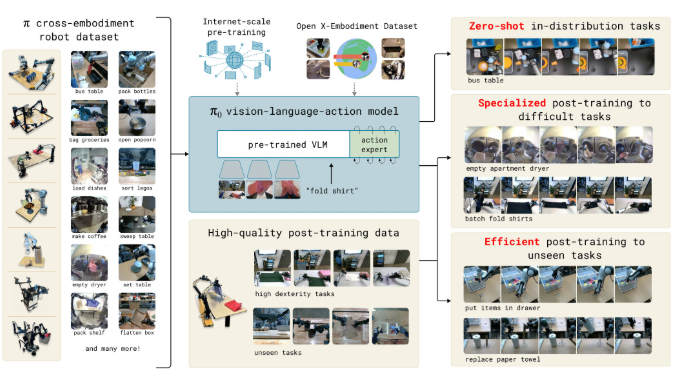
Pi0原理介绍一、Pi0 简介下面的原理介绍,基于 Pi0 论文,知识点较多,如果有谬误,欢迎反馈。论文地址:https://arxiv.org/pdf/2410.24164v1项目官网:https://www.physicalintelligence.company/blog/pi0我们使用的代码库:https://github.com/Physical-Intelligence/openpiblankπ0 是一个通用机器人策略模型(机器人基础模型),旨在解决机器人学习中的三大核心挑战:数据稀缺、泛化能力不足和鲁棒性问题。该模型采用类似大语言模型的训练范式,通过大规模预训练获得广泛的机器人操作能力,然后通过后训练适应特定任务。主要特点:支持零样本控制和语言指令跟随能够处理复杂的多阶段任务(如叠衣服、收拾桌子、组装盒子等)支持跨实体部署(7 种不同机器人配置)具备高频率精密操作能力(最高
ACT原理介绍一、ACT 简介:下面的原理介绍,基于 ACT 论文,知识点较多,如果有谬误,欢迎反馈。论文地址:https://arxiv.org/pdf/2304.13705项目官网:https://tonyzhaozh.github.io/aloha/我们使用的代码库:https://github.com/huggingface/lerobot时间版本改动点2025-09-09V 1.0第一次成稿这篇论文主要介绍了一个用于精细双臂操作的低成本学习系统,包含两个核心组件:1.1.1 ALOHA 硬件系统低成本双臂遥操作平台:整套系统成本不到 2 万美元,使用现成机器人和 3D 打印组件构建设计原则:低成本、多功能、用户友好、易维修、易组装技术特点:使用关节空间映射进行遥操作(操作员通过反驱动较小的"领导"机器人来控制较大的"跟随"机器人)配备 4
第十章 NavigationNavigation是机器人最基本的功能之一,ROS为我们提供了一整套Navigation的解决方案,包括全局与局部的路径规划、代价地图、异常行为恢复、地图服务器等等,这些开源工具包极大地减少了我们开发的工作量,任何一套移动机器人硬件平台经过这套方案就可以快速部署实现。10.1 Navigation Stack10.1.1 Navigation StackNavigation Stack是一个ROS的metapackage,里面包含了ROS在路径规划、定位、地图、异常行为恢复等方面的package,其中运行的算法都堪称经典。Navigation Stack的主要作用就是路径规划,通常是输入各传感器的数据,输出速度。一般我们的ROS都预装了Navigation。Navigation Stack的源代码位于https://github.com/ros-plannin
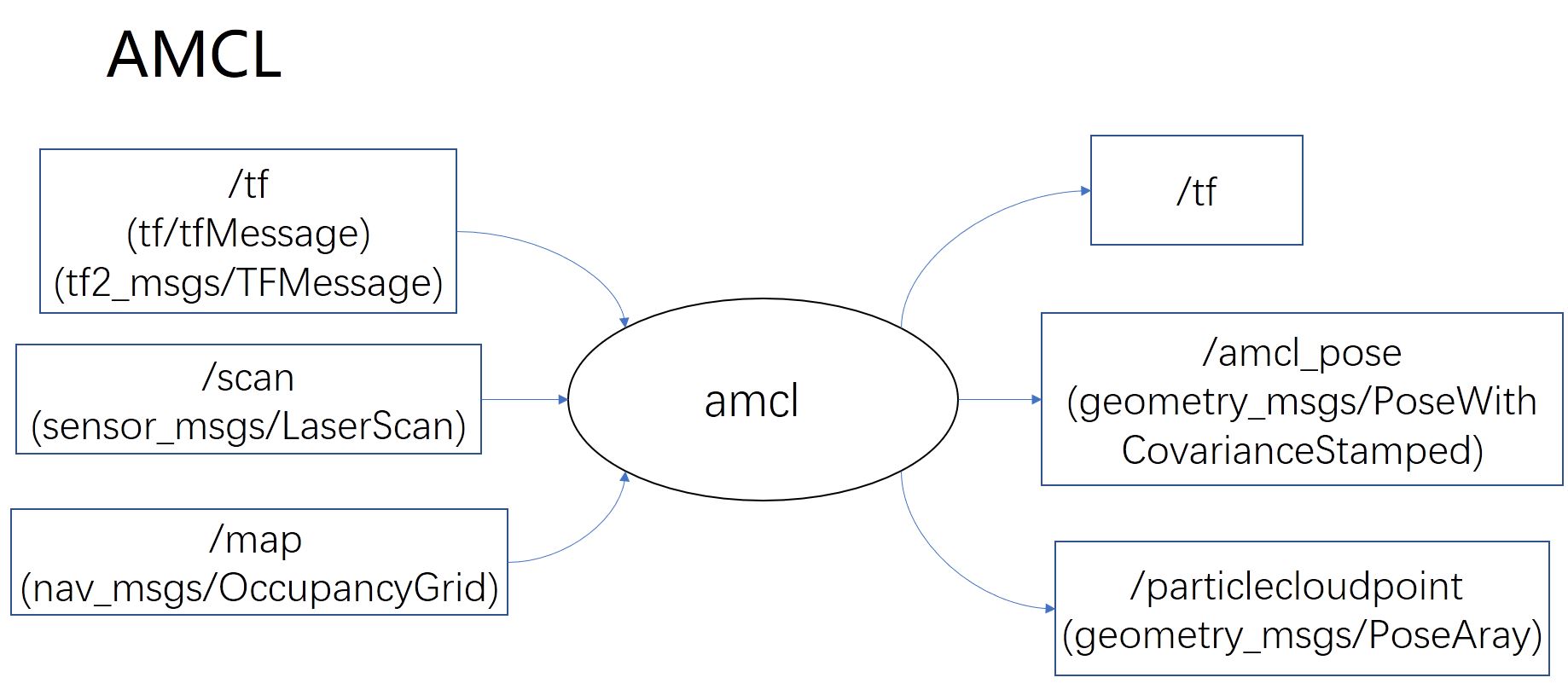
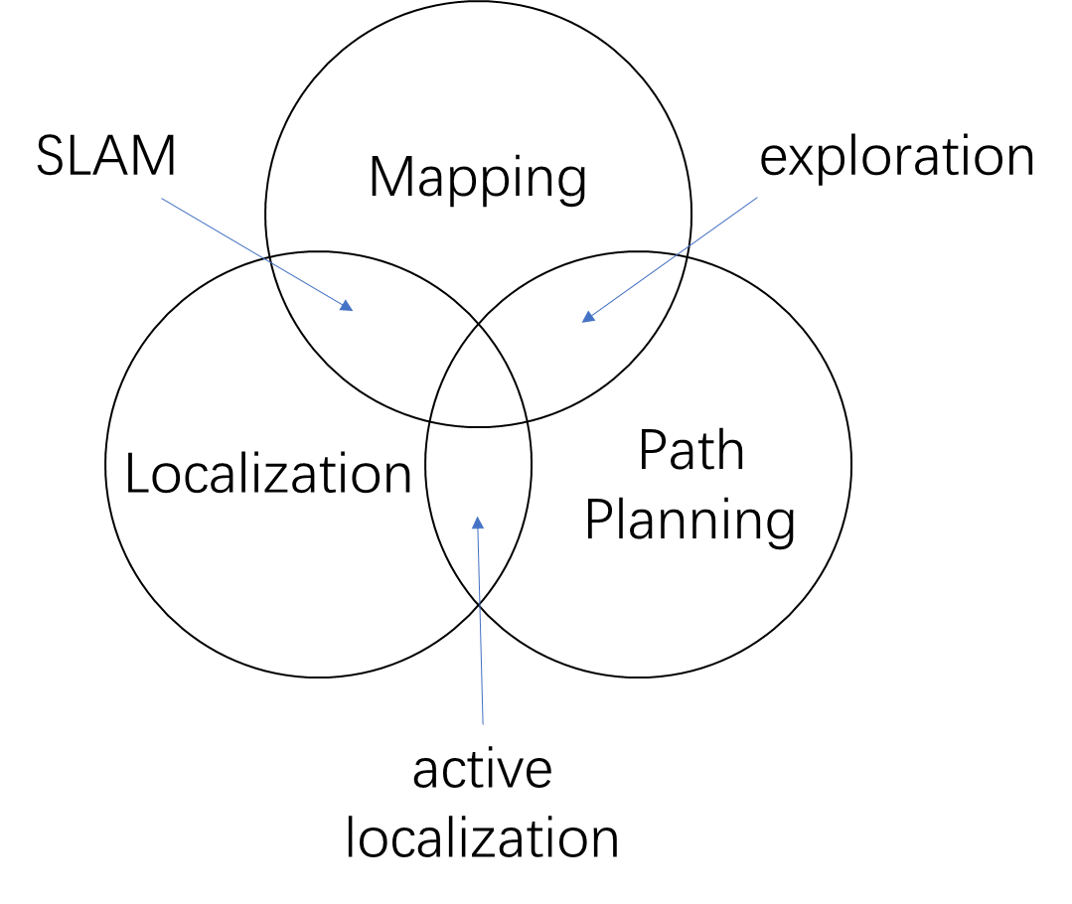
第九章 SLAM本章简介机器人研究的问题包含许许多多的领域,我们常见的几个研究的问题包括:建图(Mapping)、定位(Localization)和路径规划(Path Planning),如果机器人带有机械臂,那么运动规划(Motion Planning)也是重要的一个环节。而同步定位与建图(SLAM)问题位于定位和建图的交集部分。SLAM需要机器人在未知的环境中逐步建立起地图,然后根据地区确定自身位置,从而进一步定位。 这一章我们来看ROS中SLAM的一些功能包,也就是一些常用的SLAM算法,例如Gmapping、Karto、Hector、Cartographer等算法。这一章我们不会去关注算法背后的数学原理,而是更注重工程实现上的方法,告诉你SLAM算法包是如何工作的,怎样快速的搭建起SLAM算法。9.1 地图9.1.1 直观印象ROS中的地图很好理解,就是一张普通的灰度图像,通常为p
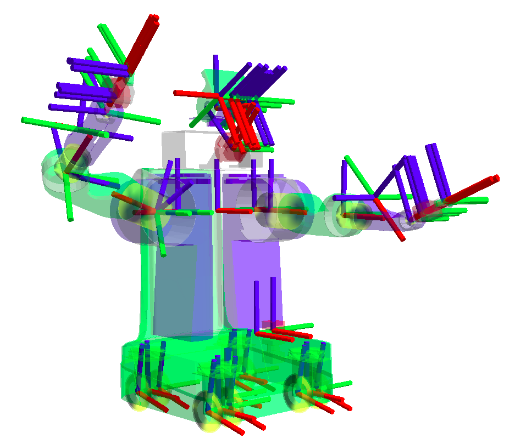
第八章 TF与URDF本章简介机器人的坐标变换一直以来是机器人学的一个难点,我们人类在进行一个简单的动作时,从思考到实施行动再到完成动作可能仅仅需要几秒钟,但是机器人来讲就需要大量的计算和坐标转换。其中的坐标转换TF和URDF是本章要详细介绍的内容。首先我们从认识TF开始,然后学习TF消息和TF树,在后面我们还介绍了TF的数据类型和在C++以及Python中的一些函数和类。也简单介绍了统一机器人描述格式URDF.学习了TF和URDF,我们才开始真正的深入认识ROS。8.1 认识TF8.1.1 简介TF是一个ROS世界里的一个基本的也是很重要的概念,所谓TF(TransForm),就是坐标转换.在现实生活中,我们做出各种行为模式都可以在很短的时间里完成,比如拿起身边的物品,但是在机器人的世界里,则远远没有那么简单.观察下图,我们来分析机器人拿起身边的物品需要做到什么,而TF又起到什么样的作用
第七章 rospy本章简介上一章我们学习了C++语音的ROS接口roscpp,本章我们来学习ROS的另一个接口rospy,也即是Python语音的接口。客户端库(Client Libarary)不仅仅指的是C++、Python语言的接口,其实是各种语言的接口统称。rospy中函数的定义,函数的用法都和roscpp不相同。本章依旧需要一定的Python编程基础,不熟悉该语言需要先行学习Python编程基础。本章的主要内容有rospy的一些常用的函数,以及一些重要的类。结合这些内容,本章还给出了topic demo和service demo的具体格式和写法,方便读者更直观的学习rospy的编写。7.1 rospy与主要接口7.1.1 rospy vs roscpprospy是Python版本的ROS客户端库,提供了Python编程需要的接口,你可以认为rospy就是一个Python的模块(Mo
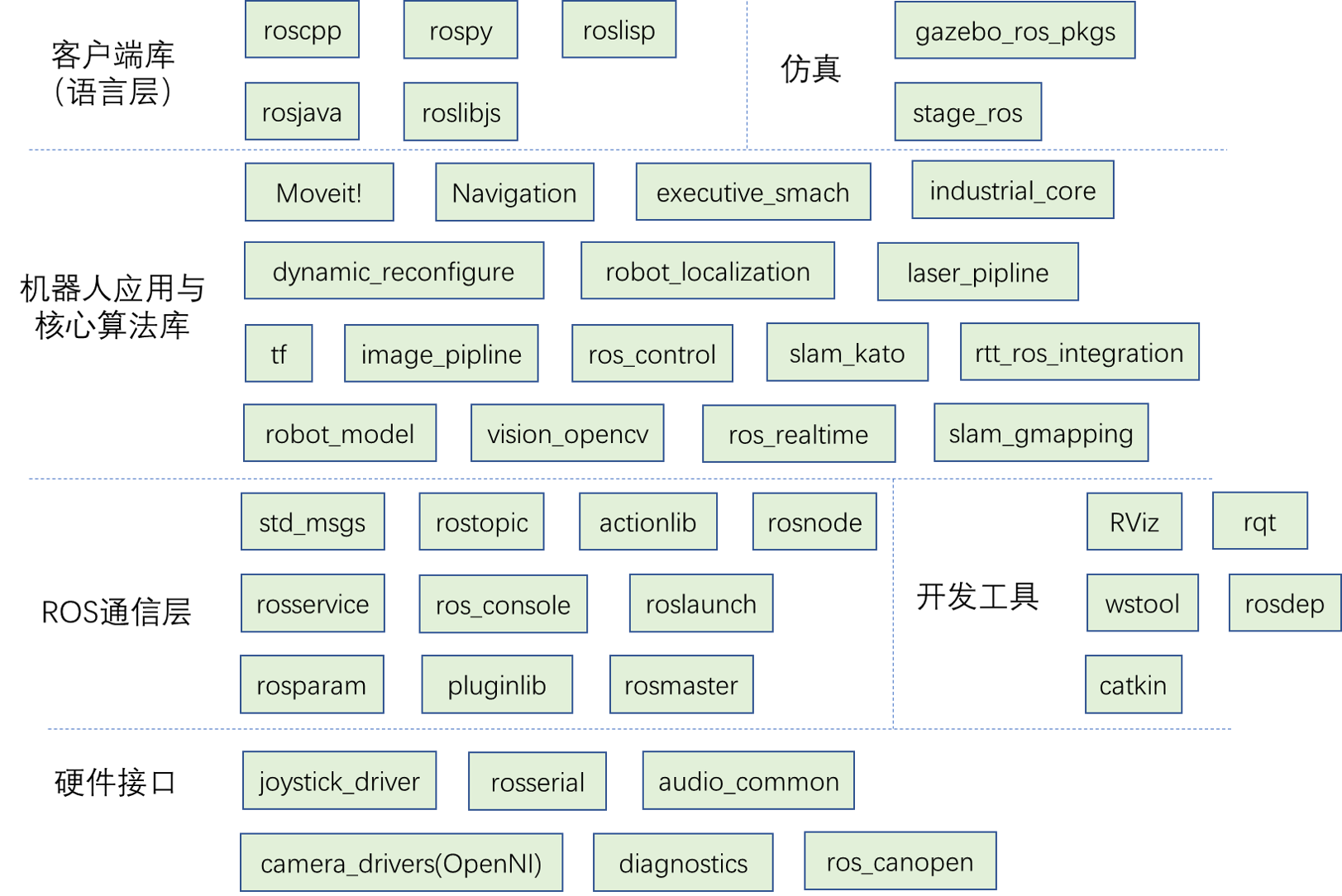
第六章 roscpp本章简介从本章开始,我们就要正式的接触ROS编程了。在之前的章节,你了解到用命令行启动ROS程序、发送指令消息,或使用可视化界面来调试机器人。你可能很想知道,这些工具到底是如何实现这些功能的。起始这些工具本质上都是基于ROS的客户端库(Client Libarary)实现的,所谓客户端库,简单的理解就是一套接口,ROS为我们机器人开发者提供了不同语言的接口,比如roscpp是C++语言ROS接口,rospy是python语言的ROS接口,我们直接调用它所提供的函数就可以实现topic、service等通信功能。本章我们介绍roscpp,给你介绍roscpp的基本函数,告诉你用C++开发ROS的基本方法。本章的内容需要有C++的基础,如果你对C++比较陌生,建议先学习C++编程。6.1 Client Library与roscpp6.1.1 Client Library简介
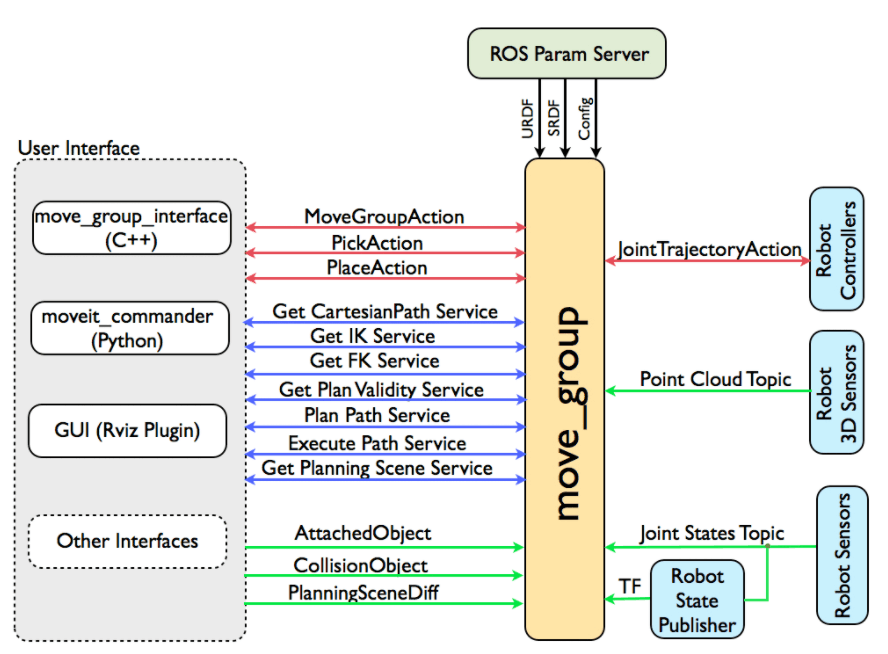
第五章 常用工具本章简介本章主要介绍了ROS开发时常常使用的工具,分别是:GazeboRVizrqtrosbagrosbridgemoveit!这六个工具是我们开发常常用到的工具,gazebo是一种最常用的ROS仿真工具,也是目前仿真ROS效果最好的工具;RViz是可视化工具,是将接收到的信息呈现出来;rqt则是非常好用的数据流可视化工具,有了它我们可以直观的看到消息的通信架构和流通路径;rosbag则是对软件包进行操作的一个命令,此外还提供代码API,对包进行操作编写。rosbridge是一个沟通ROS和外界的功能包,moveit!是目前为止应用最广泛的开源操作软件。好好学习本章,熟练使用这几款工具对于我们的ROS学习和开发都有极大的好处,可以事半功倍。5.1 Gazebo5.1.1 简介ROS中的工具就是帮助我们完成一系列的操作,使得我们的工作更加轻松高效。ROS工具的功能大概有以下几
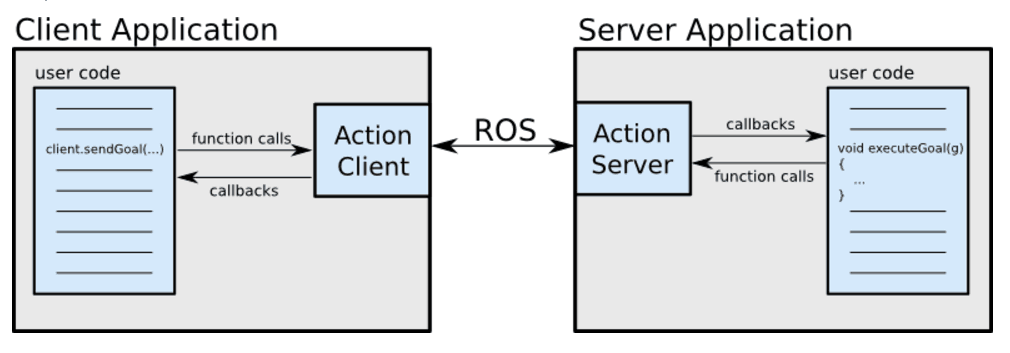
第四章 ROS通信架构(二)本章简介继上一章节介绍了ROS通信架构中最常见的话题通信方式,本章节将继续介绍ROS通信方式中的service、parameter server、actionlib。通过学习这四种通信方式,了解他们的通信原理和参数命令。当然还有各自的优缺点和不同的适用方面。通过这两章的学习,大致上会对于ROS的通信架构有一个宏观的理解,为后面的学习和实际应用提供了理论基础。4.1 Service4.1.1 Service上一章我们介绍了ROS的通信方式中的topic(主题)通信,我们知道topic是ROS中的一种单向的异步通信方式。然而有些时候单向的通信满足不了通信要求,比如当一些节点只是临时而非周期性的需要某些数据,如果用topic通信方式时就会消耗大量不必要的系统资源,造成系统的低效率高功耗。 这种情况下,就需要有另外一种请求-查询式的通信模型。这节我们来介绍ROS通信中的
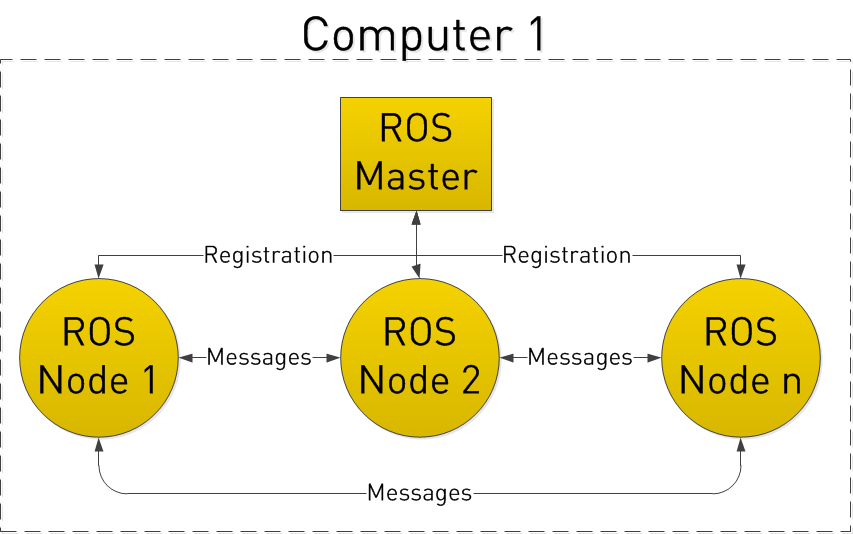
第三章 ROS通信架构(一)本章简介ROS的通信架构是ROS的灵魂,也是整个ROS正常运行的关键所在。ROS通信架构包括各种数据的处理,进程的运行,消息的传递等等。本章主要介绍了通信架构的基础通信方式和相关概念。其中首先介绍了最小的进程单元节点Node,和节点管理器Node master。了解了ROS中的进程都是由很多的Node组成,并且由Node master来管理这些节点。第二节我们介绍了ROS的“发动机”——launch文件,学习它的格式和内容,更深入的理解ROS在启动运行时它的工作都是由什么进程支配的,从而理解启动运行的原理。在后面的几节我们介绍了ROS中通信方式。ROS中的通信方式有四种,主题、服务、参数服务器、动作库。每个通信方式都有自己的特点,本章首先介绍话题通信方式--topic。3.1 Node & Master3.1.1 Node在ROS的世界里,最小的进程单元
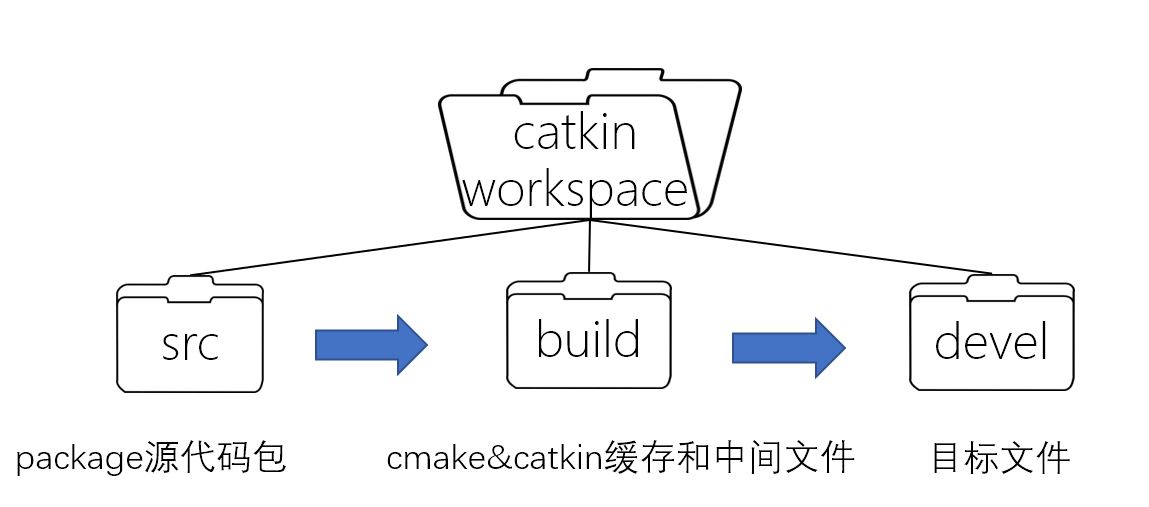
第二章 ROS文件系统本章简介本章主要介绍了ROS的工程结构,也就是ROS的文件系统结构。要学会建立一个ROS工程,首先要认识一个ROS工程,了解它们的组织架构,从根本上熟悉ROS项目的组织形式,了解各个文件的功能和作用,才能正确的进行开发和编程。本章的主要内容有,介绍catkin的编译系统,catkin工作空间的创建和结构,package软件包的创建和结构,介绍CMakeLists.txt文件,package.xml以及其他常见文件。从而系统的梳理了ROS文件空间的结构,对于我们ROS学习和开发有着重要的作用。2.1 Catkin编译系统对于源代码包,我们只有编译才能在系统上运行。而Linux下的编译器有gcc、g++,随着源文件的增加,直接用gcc/g++命令的方式显得效率低下,人们开始用Makefile来进行编译。然而随着工程体量的增大,Makefile也不能满足需求,于是便出现了C
1.1 机器人时代的到来机器人时代与ROS诞生他们速度很快,具有非凡智慧与致命力量;他们不受生命周期桎梏,是未来科技的希望。机器人和仿生机器,正要从实验室的襁褓中迸裂而出,投入市场的广阔天地,运算能力的大幅进步加上最新的机器人脑部设计,为机器人科技带来前所未有的改革,毋庸置疑,机器人即将改变人类工作场所及生活状态。神爱世人,人亦钟情所造之物,如今有幸跟随时代步伐,一起创造世界,借不灭之躯,走遍险远之地,看尽世之奇伟瑰怪。曾经,机器人创新的门槛非常高。如果你想在任何应用领域开发出有分量的产品,你需要建立一整套能够实现你想法的系统:包括硬件设备,当然还有控制系统,界面接口,以及让机器人运行并作为测试平台的检测工具。“没有什么是现成的设备,除了一些很差,闭源的东西外。”随着机器人领域的快速发展和复杂化,代码复用和模块化的需求日益强烈,已有的开源系统已不能很好地适应需求,2010年Willow G