第八章 TF与URDF本章简介机器人的坐标变换一直以来是机器人学的一个难点,我们人类在进行一个简单的动作时,从思考到实施行动再到完成动作可能仅仅需要几秒钟,但是机器人来讲就需要大量的计算和坐标转换。其中的坐标转换TF和URDF是本章要详细介绍的内容。首先我们从认识TF开始,然后学习TF消息和TF树,在后面我们还介绍了TF的数据类型和在C++以及Python中的一些函数和类。也简单介绍了统一机器人描述格式URDF.学习了TF和URDF,我们才开始真正的深入认识ROS。8.1 认识TF8.1.1 简介TF是一个ROS世界里的一个基本的也是很重要的概念,所谓TF(TransForm),就是坐标转换.在现实生活中,我们做出各种行为模式都可以在很短的时间里完成,比如拿起身边的物品,但是在机器人的世界里,则远远没有那么简单.观察下图,我们来分析机器人拿起身边的物品需要做到什么,而TF又起到什么样的作用

本章简介
机器人的坐标变换一直以来是机器人学的一个难点,我们人类在进行一个简单的动作时,从思考到实施行动再到完成动作可能仅仅需要几秒钟,但是机器人来讲就需要大量的计算和坐标转换。其中的坐标转换TF和URDF是本章要详细介绍的内容。
首先我们从认识TF开始,然后学习TF消息和TF树,在后面我们还介绍了TF的数据类型和在C++以及Python中的一些函数和类。也简单介绍了统一机器人描述格式URDF.学习了TF和URDF,我们才开始真正的深入认识ROS。
8.1 认识TF
8.1.1 简介
TF是一个ROS世界里的一个基本的也是很重要的概念,所谓TF(TransForm),就是坐标转换.在现实生活中,我们做出各种行为模式都可以在很短的时间里完成,比如拿起身边的物品,但是在机器人的世界里,则远远没有那么简单.观察下图,我们来分析机器人拿起身边的物品需要做到什么,而TF又起到什么样的作用.

观察这个机器人,我们直观上不认为拿起物品会又什么难度,站在人类的立场上,我们也许会想到手向前伸,抓住,手收回.就完成了这整个一系列的动作.但是如今的机器人远远没有这么智能,它能得到的只是各种传感器发送回来的数据,然后它再处理各种数据进行操作,比如手臂弯曲45度,再向前移动20cm等这样的各种十分精确的数据,尽管如此,机器人依然没法做到像人类一样自如的进行各种行为操作.那么在这个过程中,TF又扮演着什么样的角色呢?还拿该图来说,当机器人的"眼睛"获取一组数据,关于物体的坐标方位,但是相对于机器人手臂来说,这个坐标只是相对于机器人头部的传感器,并不直接适用于机器人手臂执行,那么物体相对于头部和手臂之间的坐标转换,就是TF.
坐标变换包括了位置和姿态两个方面的变换,ROS中的tf是一个可以让用户随时记录多个坐标系的软件包。tf保持缓存的树形结构中的坐标系之间的关系,并且允许用户在任何期望的时间点在任何两个坐标系之间转换点,矢量等.
8.1.2 ROS中的TF
tf的定义不是那么的死板,它可以被当做是一种标准规范,这套标准定义了坐标转换的数据格式和数据结构.tf本质是树状的数据结构,所以我们通常称之为"tf tree",tf也可以看成是一个topic:/tf,话题中的message保存的就是tf tree的数据结构格式.维护了整个机器人的甚至是地图的坐标转换关系.tf还可以看成是一个package,它当中包含了很多的工具.比如可视化,查看关节间的tf,debug tf等等.tf含有一部分的接口,就是我们前面章节介绍的roscpp和rospy里关于tf的API.所以可以看成是话题转换的标准,话题,工具,接口.

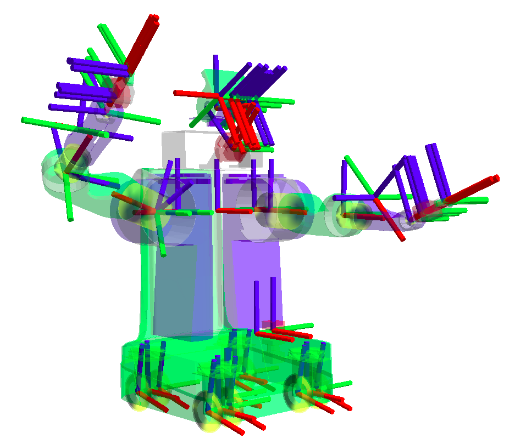
观察上图,我们可以看到ROS数据结构的一个抽象图,ROS中机器人模型包含大量的部件,这些部件统称之为link,每一个link上面对应着一个frame, 即一个坐标系.link和frame概念是绑定在一起的.像上图pr2模型中我们可以看到又很多的frame,错综复杂的铺置在机器人的各个link上,维护各个坐标系之间的关系,就要靠着tf tree来处理,维护着各个坐标系之间的联通.如下图:
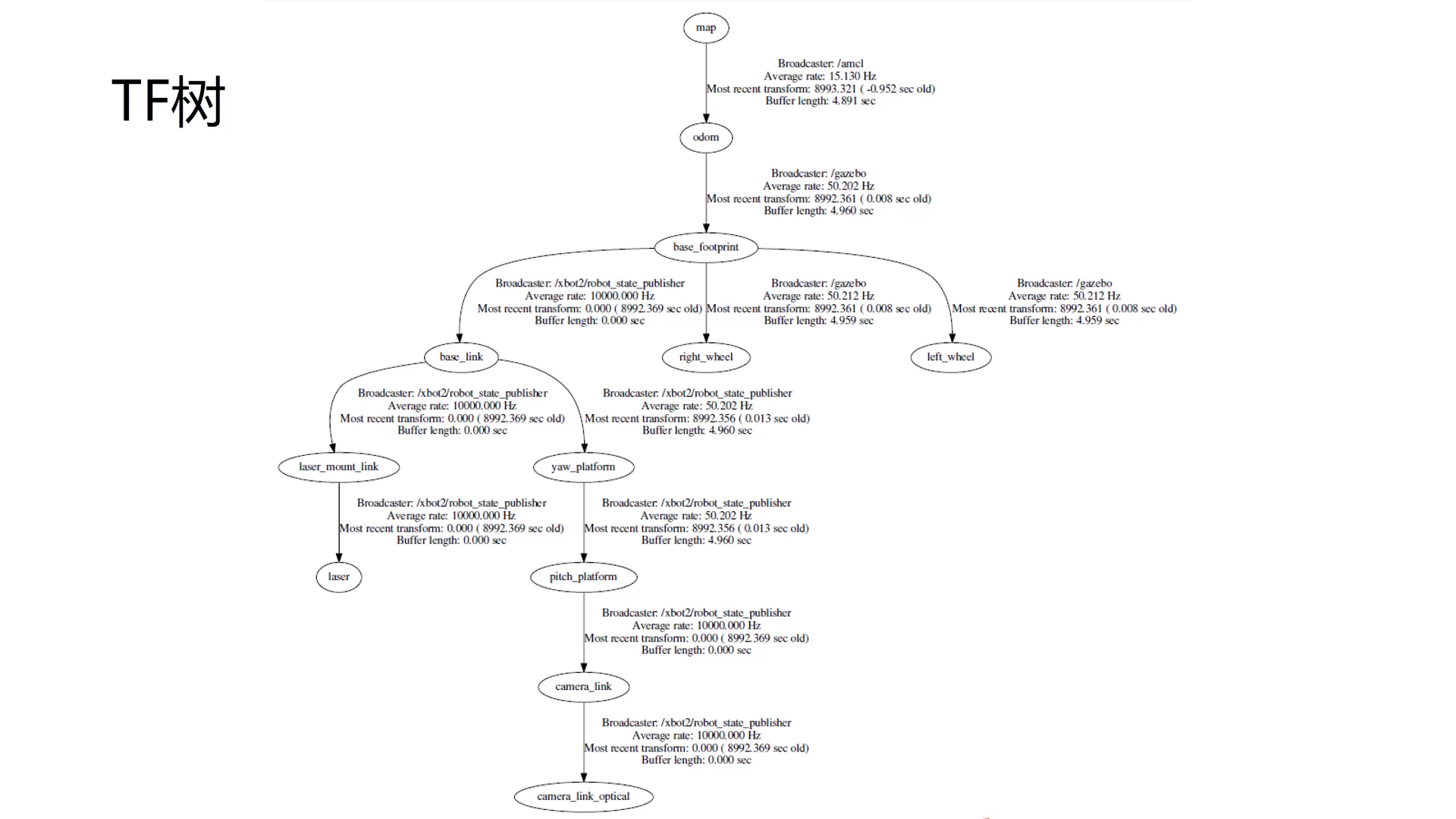
上图是我们常用的robot_sim_demo运行起来的tf tree结构,每一个圆圈代表一个frame,对应着机器人上的一个link,任意的两个frame之间都必须是联通的,如果出现某一环节的断裂,就会引发error系统报错.所以完整的tf tree不能有任何断层的地方,这样我们才能查清楚任意两个frame之间的关系.仔细观察上图,我们发现每两个frame之间都有一个broadcaster,这就是为了使得两个frame之间能够正确连通,中间都会有一个Node来发布消息来broadcaster.如果缺少Node来发布消息维护连通,那么这两个frame之间的连接就会断掉.broadcaster就是一个publisher,如果两个frame之间发生了相对运动,broadcaster就会发布相关消息.
8.2 TF消息
8.2.1 TransformStamped.msg
上一节在介绍ROS中的TF时候我们已经初步的认识了TF和TF树,了解了在每个frame之间都会有broadcaster来发布消息维系坐标转换.那么这个消息到底是什么样子的呢?这个消息TransformStampde.msg,它就是处理两个frame之间一小段tf的数据格式.
8.2.2 格式规范
TransformStamped.msg的格式规范如下:
std_mags/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
flaot64 z
float64 w
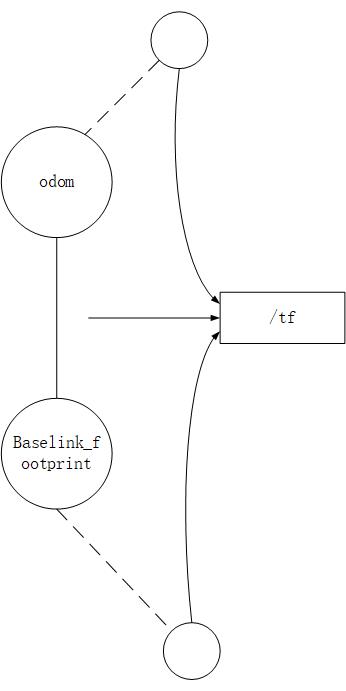
观察标准的格式规范,首先header定义了序号,时间以及frame的名称.接着还写了child_frame,这两个frame之间要做那种变换就是由geometry_msgs/Transform来定义.Vector3三维向量表示平移,Quaternion四元数表示旋转.像下图TF树中的两个frame之间的消息,就是由这种格式来定义的.odom就是frame_id,baselink_footprint就是child_frame_id.我们知道,一个topic上面,可能会有很多个node向上面发送消息。如图所示,不仅有我们看到的frame发送坐标变换个tf,还有别的frame也在同样的向它发送消息。最终,许多的TransformStamped.msg发向tf,形成了TF树。
8.2.3 TF树的数据类型
上面我们讲了,TF tree是由很多的frame之间TF拼接而成。那么TF tree是什么类型呢?如下:
tf/tfMessage.msg
tf2_msgs/TFMessage.msg
这里TF的数据类型有两个,主要的原因是版本的迭代。自ROS Hydro以来,tf第一代已被“弃用”,转而支持tf2。tf2相比tf更加简单高效。此外也添加了一些新的功能。
由于tf2是一个重大的变化,tf API一直保持现有的形式。由于tf2具有tf特性的超集和一部分依赖关系,所以tf实现已经被移除,并被引用到tf2下。这意味着所有用户都将与tf2兼容。官网建议新工作直接使用tf2,因为它有一个更清洁的界面,和更好的使用体验。
如何查看自己使用的TF是哪一个版本,使用命令rostopic info /tf即可。
8.2.4 格式定义
tf/tfMessage.msg或tf2_msgs/TFMessage标准格式规范如下:
geometry_msgs/TransformStamped[] transforms
std_msgs/Header header
uint32 seq
time stamp
string frame_id
string child_frame_id
geometry_msgs/Transform transform
geometry_msgs/Vector3 translation
float64 x
float64 y
float64 z
geometry_msgs/Quaternion rotation
float64 x
float64 y
flaot64 z
float64 w
如上,一个TransformStamped数组就是一个TF tree。
8.3 tf in c++
8.3.1 简介
前面内容我们介绍了TF的基本的概念和TF树消息的格式类型,我们知道,TF不仅仅是一个标准、话题,它还是一个接口。本节课我们就介绍c++中TF的一些函数和写法。
8.3.2 数据类型
C++中给我们提供了很多TF的数据类型,如下表:
名称 数据类型 向量 tf::Vector3 点 tf::Point 四元数 tf::Quaternion 3*3矩阵(旋转矩阵) tf::Matrix3x3 位姿 tf::pose 变换 tf::Transform 带时间戳的以上类型 tf::Stamped 带时间戳的变换 tf::StampedTransform
易混注意:虽然此表的最后带时间戳的变换数据类型为tf::StampedTransform,和上节我们所讲的geometry_msgs/TransformStamped.msg看起来很相似,但是其实数据类型完全不一样,tf::StampedTransform只能用在C++里,只是C++的一个类,一种数据格式,并不是一个消息。而geometry_msgs/TransformStamped.msg是一个message,它依赖于ROS,与语言无关,也即是无论何种语言,C++、Python、Java等等,都可以发送该消息。
8.3.3 数据转换
![]()
在TF里有可能会遇到各种各样数据的转换,例如常见的四元数、旋转矩阵、欧拉角这三种数据之间的转换。tf in roscpp给了我们解决该问题的函数。详细源码在我们教学课程的代码包中。 首先在tf中与数据转化的数据都类型都包含在#include<tf/tf.h>头文件中,我们将与数据转换相关API都存在tf_demo中的coordinate_transformation.cpp当中,其中列表如下:
第1部分定义空间点和空间向量
编号 函数名称 函数功能 1.1 tfScalar::tfDot(const Vector3 &v1, const Vector3 &v2) 计算两个向量的点积 1.2 tfScalar length() 计算向量的模 1.3 Vector3 &normalize() 求与已知向量同方向的单位向量 1.4 tfScalar::tfAngle(const Vector3 &v1, const Vector3 &v2) 计算两个向量的夹角 1.5 tfScale::tfDistance(const Vector3 &v1, const Vector3 &v2) 计算两个向量的距离 1.6 tfScale::tfCross(const Vector3 &v1,const Vector3 &v2) 计算两个向量的乘积
示例代码:
#include <ros/ros.h>
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "coordinate_transformation");
ros::NodeHandle node;
tf::Vector3 v1(1,1,1);
tf::Vector3 v2(1,0,1);
//第1部分,定义空间点和空间向量
std::cout<<"第1部分,定义空间点和空间向量"<<std::endl;
//1.1 计算两个向量的点积
std::cout<<"向量v1:"<<"("<<v1[0]<<","<<v1[1]<<","<<v1[2]<<"),";
std::cout<<"向量v2:"<<"("<<v2[0]<<","<<v2[1]<<","<<v2[2]<<")"<<std::endl;
std::cout<<"两个向量的点积:"<<tfDot(v1,v2)<<std::endl;
//1.2 计算向量的模
std::cout<<"向量v2的模值:"<<v2.length()<<std::endl;
//1.3 求与已知向量同方向的单位向量
tf::Vector3 v3;
v3=v2.normalize();
std::cout<<"与向量v2的同方向的单位向量v3:"<<"("<<v3[0]<<","<<v3[1]<<","<<v3[2]<<")"<<std::endl;
//1.4 计算两个向量的夹角
std::cout<<"两个向量的夹角(弧度):"<<tfAngle(v1,v2)<<std::endl;
//1.5 计算两个向量的距离
std::cout<<"两个向量的距离:"<<tfDistance2(v1,v2)<<std::endl;
//1.6 计算两个向量的乘积
tf::Vector3 v4;
v4=tfCross(v1,v2);
std::cout<<"两个向量的乘积v4:"<<"("<<v4[0]<<","<<v4[1]<<","<<v4[2]<<")"<<std::endl;```
return 0;
}
第2部分定义四元数
编号 函数名称 函数功能 2.1 setRPY(const tfScalar& yaw, const stScalar &pitch, const tfScalar &roll) 由欧拉角计算四元数 2.2 Vector3 getAxis() 由四元数得到旋转轴 2.3 setRotation(const Vector3 &axis, const tfScalar& angle) 已知旋转轴和旋转角估计四元数
示例代码:
#include <ros/ros.h>
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "coordinate_transformation");
ros::NodeHandle node;
std::cout<<"第2部分,定义四元数"<<std::endl;
//2.1 由欧拉角计算四元数
tfScalar yaw,pitch,roll;
yaw=0;pitch=0;roll=0;
std::cout<<"欧拉角rpy("<<roll<<","<<pitch<<","<<yaw<<")";
tf::Quaternion q;
q.setRPY(yaw,pitch,roll);
std::cout<<",转化到四元数q:"<<"("<<q[3]<<","<<q[0]<<","<<q[1]<<","<<q[2]<<")"<<std::endl;
//2.2 由四元数得到旋转轴
tf::Vector3 v5;
v5=q.getAxis();
std::cout<<"四元数q的旋转轴v5"<<"("<<v5[0]<<","<<v5[1]<<","<<v5[2]<<")"<<std::endl;
//2.3 由旋转轴和旋转角来估计四元数
tf::Quaternion q2;
q2.setRotation(v5,1.570796);
std::cout<<"旋转轴v5和旋转角度90度,转化到四元数q2:"<<"("<<q2[3]<<","<<q2[0]<<","<<q2[1]<<","<<q2[2]<<")"<<std::endl;
return 0;
}
第3部分定义旋转矩阵
编号 函数名称 函数功能 3.1 setRotaion(const Quaternion &q) 通过四元数得到旋转矩阵 3.2 getEulerYPR(tfScalar &yaw, tfScalar &pitch, tfScalar &roll ) 由旋转矩阵求欧拉角
示例代码:
#include <ros/ros.h>
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "coordinate_transformation");
ros::NodeHandle node;
//第3部分,定义旋转矩阵
std::cout<<"第3部分,定义旋转矩阵"<<std::endl;
//3.1 由旋转轴和旋转角来估计四元数
tf::Quaternion q2(1,0,0,0);
tf::Matrix3x3 Matrix;
tf::Vector3 v6,v7,v8;
Matrix.setRotation(q2);
v6=Matrix[0];
v7=Matrix[1];
v8=Matrix[2];
std::cout<<"四元数q2对应的旋转矩阵M:"<<v6[0]<<","<<v6[1]<<","<<v6[2]<<std::endl;
std::cout<<" "<<v7[0]<<","<<v7[1]<<","<<v7[2]<<std::endl;
std::cout<<" "<<v8[0]<<","<<v8[1]<<","<<v8[2]<<std::endl;
//3.2 通过旋转矩阵求欧拉角
tfScalar m_yaw,m_pitch,m_roll;
Matrix.getEulerYPR(m_yaw,m_pitch,m_roll);
std::cout<<"由旋转矩阵M,得到欧拉角rpy("<<m_roll<<","<<m_pitch<<","<<m_yaw<<")"<<std::endl;
return 0;
};
此外,在tf_demo的教学包中,我们还提供常见的欧拉角与四元数的互换,详见Euler2Quaternion.cpp与Quaternion2Euler.cpp Euler2Quaternion.cpp
#include <ros/ros.h>
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "Euler2Quaternion");
ros::NodeHandle node;
geometry_msgs::Quaternion q;
double roll,pitch,yaw;
while(ros::ok())
{
//输入一个相对原点的位置
std::cout<<"输入的欧拉角:roll,pitch,yaw:";
std::cin>>roll>>pitch>>yaw;
//输入欧拉角,转化成四元数在终端输出
q=tf::createQuaternionMsgFromRollPitchYaw(roll,pitch,yaw);
//ROS_INFO("输出的四元数为:w=%d,x=%d,y=%d,z=%d",q.w,q.x,q.y,q.z);
std::cout<<"输出的四元数为:w="<<q.w<<",x="<<q.x<<",y="<<q.y<<",z="<<q.z<<std::endl;
ros::spinOnce();
}
return 0;
};
Quaternion2Euler.cpp
#include <ros/ros.h>
#include "nav_msgs/Odometry.h"
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "Quaternion2Euler");
ros::NodeHandle node;
nav_msgs::Odometry position;
tf::Quaternion RQ2;
double roll,pitch,yaw;
while(ros::ok())
{
//输入一个相对原点的位置
std::cout<<"输入的四元数:w,x,y,z:";
std::cin>>position.pose.pose.orientation.w>>position.pose.pose.orientation.x>>position.pose.pose.orientation.y>>position.pose.pose.orientation.z;
//输入四元数,转化成欧拉角数在终端输出
tf::quaternionMsgToTF(position.pose.pose.orientation,RQ2);
// tf::Vector3 m_vector3; 方法2
// m_vector3=RQ2.getAxis();
tf::Matrix3x3(RQ2).getRPY(roll,pitch,yaw);
std::cout<<"输出的欧拉角为:roll="<<roll<<",pitch="<<pitch<<",yaw="<<yaw<<std::endl;
//std::cout<<"输出欧拉角为:roll="<<m_vector3[0]<<",pitch="<<m_vector3[1]<<",yaw="<<m_vector3[2]<<std::endl;
ros::spinOnce();
}
return 0;
};
8.3.4 TF类
tf::TransformBroadcaster类
transformBroadcaster()
void sendTransform(const StampedTransform &transform)
void sendTransform(const std::vector<StampedTransform> &transforms)
void sendTransform(const geometry_msgs::TransformStamped &transform)
void sendTransform(const std::vector<geometry_msgs::TransformStamped> &transforms)
这个类在前面讲TF树的时候提到过,这个broadcaster就是一个publisher,而sendTransform的作用是来封装publish的函数。在实际的使用中,我们需要在某个Node中构建tf::TransformBroadcaster类,然后调用sendTransform(),将transform发布到/tf的一段transform上。/tf里的transform为我们重载了多种不同的函数类型。在我们的tf_demo教学包当中提供了相关的示例代码tf.broadcaster.cpp,具体如下:
#include <ros/ros.h>
#include <tf/transform_broadcaster.h>
#include <tf/tf.h>
//退出用:ctrl+z
int main(int argc, char** argv){
//初始化
ros::init(argc, argv, "tf_broadcaster");
ros::NodeHandle node;
static tf::TransformBroadcaster br;
tf::Transform transform;
//geometry_msgs::Quaternion qw;
tf::Quaternion q;
//定义初始坐标和角度
double roll=0,pitch=0,yaw=0,x=1.0,y=2.0,z=3.0;
ros::Rate rate(1);
while(ros::ok())
{
yaw+=0.1;//每经过一秒开始一次变换
//输入欧拉角,转化成四元数在终端输出
q.setRPY(roll,pitch,yaw);
//qw=tf::createQuaternionMsgFromRollPitchYaw(roll,pitch,yaw);方法2
transform.setOrigin(tf::Vector3(x,y,z));
transform.setRotation(q);
std::cout<<"发布tf变换:sendTransform函数"<<std::endl;
br.sendTransform(tf::StampedTransform(transform,ros::Time::now(),"base_link","link1"));
std::cout<<"输出的四元数为:w="<<q[3]<<",x="<<q[0]<<",y="<<q[1]<<",z="<<q[2]<<std::endl;
// std::cout<<"输出的四元数为:w="<<qw.w<<",x="<<qw.x<<",y="<<qw.y<<",z="<<qw.z<<std::endl;
rate.sleep();
ros::spinOnce();
}
return 0;
};tf::TransformListener类
void lookupTranform(const std::string &target_frame,const std::string &source_frame,const ros::Time &time,StampedTransform &transform)const
bool canTransform()
bool waitForTransform()const
上一个类是向/tf上发的类,那么这一个就是从/tf上接收的类。首先看lookuptransform()函数,第一个参数是目标坐标系,第二个参数为源坐标系,也即是得到从源坐标系到目标坐标系之间的转换关系,第三个参数为查询时刻,第四个参数为存储转换关系的位置。值得注意,第三个参数通常用ros::Time(0),这个表示为最新的坐标转换关系,而ros::time::now则会因为收发延迟的原因,而不能正确获取当前最新的坐标转换关系。canTransform()是用来判断两个transform之间是否连通,waitForTransform()const是用来等待某两个transform之间的连通,在我们的tf_demo教学包当中提供了相关的示例代码tf_listerner.cpp,具体如下:
#include <ros/ros.h>
#include <tf/transform_listener.h>
#include <geometry_msgs/Twist.h>
int main(int argc, char** argv){
ros::init(argc, argv, "tf_listener");
ros::NodeHandle node;
tf::TransformListener listener;
//1. 阻塞直到frame相通
std::cout<<"1. 阻塞直到frame相通"<<std::endl;
listener.waitForTransform("/base_link","link1",ros::Time(0),ros::Duration(4.0));
ros::Rate rate(1);
while (node.ok()){
tf::StampedTransform transform;
try{
//2. 监听对应的tf,返回平移和旋转
std::cout<<"2. 监听对应的tf,返回平移和旋转"<<std::endl;
listener.lookupTransform("/base_link", "/link1",
ros::Time(0), transform);
//ros::Time(0)表示最近的一帧坐标变换,不能写成ros::Time::now()
}
catch (tf::TransformException &ex) {
ROS_ERROR("%s",ex.what());
ros::Duration(1.0).sleep();
continue;
}
std::cout<<"输出的位置坐标:x="<<transform.getOrigin().x()<<",y="<<transform.getOrigin().y()<<",z="<<transform.getOrigin().z()<<std::endl;
std::cout<<"输出的旋转四元数:w="<<transform.getRotation().getW()<<",x="<<transform.getRotation().getX()<<
",y="<<transform.getRotation().getY()<<",z="<<transform.getRotation().getZ()<<std::endl;
rate.sleep();
}
return 0;
};
8.4 tf in python
8.4.1 简介
我们知道tf中不仅有C++的接口,也有Python的接口。相比C++,tf在Python中的具体实现相对简单好用。
8.4.2 数据类型
TF的相关数据类型,向量、点、四元数、矩阵都可以表示成类似数组形式,就是它们都可以用Tuple,List,Numpy Array来表示。 例如:
t = (1.0,1.5,0) #平移 q = [1,0,0,0] #四元数 m = numpy.identity(3) #旋转矩阵
第一个平移数据使用Tuple表示的,同时也可以用List表示成t=[1.0,1.5,0],也能用numpy.array(1.0,1.5,0)来表示都是可以的。这些数据类型没有特殊对应,全部是通用的,所以这里也就没有了各种数据类型的转换的麻烦。
8.4.3 TF库
tf.transformations
基本数学运算函数
函数 注释 euler_matrix(ai,aj,ak,axes='sxyz') 欧拉角到矩阵 eulaer_form_matrix(matrix,axes='sxyz') 矩阵到欧拉角 eular_from_quaternion(quaternion,axes='sxyz') 四元数到欧拉角 quaternion_form_euler(ai,aj,ak,axes='sxyz') 欧拉角到四元数 quaternion_matrix(quaternion) 四元数到矩阵 quaternion_form_matrix(matrix) 矩阵到四元数 ...... ......
使用该函数库时候,首先import tf,tf.transformations给我们提供了一些基本的数学运算函数如上,使用起来非常方便。在tf_demo中教学包当中,我们列举了一些tf.transformations常见的API和示例代码,具详见下表。
第1部分,定义空间点和空间向量
编号 函数名称 函数功能 1.1 tf.transformations.random_quaternion(rand=None) 返回均匀随机单位四元数 1.2 tf.transformations.random_rotation_matrix(rand=None) 返回均匀随机单位旋转矩阵 1.3 tf.transformations.random_vector(size) 返回均匀随机单位向量 1.4 tf.transformations.translation_matrix(v) 通过向量来求旋转矩阵 1.5 tf.transformations.translation_from_matrix(m) 通过旋转矩阵来求向量
第2部分,定义四元数
编号 函数名称 函数功能 2.1 tf.transformations.quaternion_about_axis(angle axis) 通过旋转轴和旋转角返回四元数 2.2 tf.transformations.quaternion_conjugate(quaternion) 返回四元数的共轭 2.3 tf.transformations.quaternion_from_euler(ai,aj,ak, axes'ryxz') 从欧拉角和旋转轴,求四元数 2.4 tf.transformations.quaternion_from_matrix(matrix) 从旋转矩阵中,返回四元数 2.5 tf.transformations.quaternion_multiply(quaternion1,quaternion2) 两个四元数相乘
第3部分,定义四元数
编号 函数名称 函数功能 3.1 tf.transformations.euler_matrix(ai,aj,ak,axes='xyz') 由欧拉角和旋转轴返回旋转矩阵 3.2 tf.transformations.euler_from_matrix(matrix) 由旋转矩阵和特定的旋转轴返回欧拉角 3.3 tf.transformations.euler_from_quaternion(quaternion) 由四元数和特定的轴得到欧拉角
示例代码:
#!/usr/bin/env python
# -*- coding:utf-8 -*-
import rospy
import math
import tf
if __name__ == '__main__':
rospy.init_node('py_coordinate_transformation')
#第1部分,定义空间点和空间向量
print '第1部分,定义空间点和空间向量'
#1.1 返回均匀随机单位四元数
q=tf.transformations.random_quaternion(rand=None)
print '定义均匀随机四元数:'
print q
#1.2 返回均匀随机单位旋转矩阵
m=tf.transformations.random_rotation_matrix(rand=None)
print '定义均匀随机单位旋转矩阵:'
print m
#1.3 返回均匀随机单位向量
v=tf.transformations.random_vector(3)
print '定义均匀随机单位向量:'
print v
#1.4 通过向量来求旋转矩阵
v_m=tf.transformations.translation_matrix(v)
print '通过向量来求旋转矩阵:'
print v_m
#1.5 通过旋转矩阵来求向量
m_v=tf.transformations.translation_from_matrix(m)
print '通过旋转矩阵来求向量:'
print m_v
#第2部分,定义四元数
print '第2部分,定义四元数'
#2.1 通过旋转轴和旋转角返回四元数
axis_q=tf.transformations.quaternion_about_axis(0.123, (1, 0, 0))
print '通过旋转轴和旋转角返回四元数:'
print axis_q
#2.2 返回四元数的共轭
n_q=tf.transformations.quaternion_conjugate(q)
print '返回四元数q的共轭:'
print n_q
#2.3 从欧拉角和旋转轴,求四元数
o_q=tf.transformations.quaternion_from_euler(1, 2, 3, 'ryxz')
print '从欧拉角和旋转轴,求四元数:'
print o_q
#2.4 从旋转矩阵中,返回四元数
m_q=tf.transformations.quaternion_from_matrix(m)
print '从旋转矩阵中,返回四元数:'
print m_q
#2.5 两个四元数相乘
qxq=tf.transformations.quaternion_multiply(q,n_q)
print '两个四元数相乘'
print qxq
`8.4.4 TF类
tf.TransformListener类
方法 作用 canTransform(self,target_frame,source_frame,time) frame是否相通 waitForTransform(self,target_frame,source_frame,time,timeout) 阻塞直到frame相通 lookup Transform(self,target_frame,source_frame,time) 查看相对的tf,返回(trans,quat)
tf.TransformListener类中主要包含以上三种方法,它的构造函数不需要填值。注意这里的time参数,依然是使用rospy.Time(0)而不是rospy.Time.now().具体原因上节已经介绍,这里不再赘述。除了上述三种重要的方法,这个类中还有一些辅助用的方法如下:
方法 作用 chain(target_frame,target_time,source_frame,source_time,fixed_frame) frame的连接关系 frameExists(self,frame_id) frame是否存在 getFrameStrings(self) 返回所有tf的名称 fromTranslationRotation(translation,rotation) 根据平移和旋转返回4X4矩阵 transformPoint(target_frame,point_msg) 将PointStamped消息转换到新frame下 transformPose(target_frame,pose_msg) 将PoseStamped消息转换到新frame下 transformQuaternion(target_frame,quat_msg) 将QuaternionStamped...返回相同类型 ... ...
在tf_demo教学包当中的scripts/py_tf_listerner.py给出了示例程序,详见如下。
py_tf_listerner.py
#!/usr/bin/env python
# -*- coding:utf-8 -*-
import rospy
import math
import tf
if __name__ == '__main__':
rospy.init_node('py_tf_turtle')
listener = tf.TransformListener() #TransformListener创建后就开始接受tf广播信息,最多可以缓存10s 目前存在的问题,是四个数值的顺序我还有点问题
rate = rospy.Rate(1.0)
#1. 阻塞直到frame相通
print '1. 阻塞直到frame相通'
listener.waitForTransform("/base_link", "/link1", rospy.Time(), rospy.Duration(4.0))
while not rospy.is_shutdown():
try:
#2. 监听对应的tf,返回平移和旋转
print '2. 监听对应的tf,返回平移和旋转'
(trans,rot) = listener.lookupTransform('/base_link', '/link1', rospy.Time(0)) #rospy.Time(0)不表示0时刻的tf,而是指最近一帧tf
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
rospy.loginfo('距离原点的位置: x=%f ,y= %f,z=%f \n 旋转四元数: w=%f ,x= %f,y=%f z=%f ',trans[0],trans[1],trans[2],rot[0],rot[1],rot[2],rot[3])
#3. 判断两个frame是否相通
print '3. 判断两个frame是否相通'
if listener.canTransform('/link1','/base_link',rospy.Time(0)) :
print 'true'
else :
print 'false'
rate.sleep()tf.TransformBroadcaster类
类似的,我们介绍的是发布方,tf.TransformBroadcaster类。该类的构造函数也是不需要填值,成员函数有两个如下:
sendTransform(translation,rotation,time,child,parent)#向/tf发布消息
sendTransformMessage(transform)#向/tf发布消息
第一个sendTransform()把transform的平移和旋转填好,打上时间戳,然后表示出从父到子的frame流,然后发向/tf的topic。第二种是发送transform已经封装好的Message给/tf,这两种不同的发送方式,功能是一致的。在tf_demo教学包当中的scripts/py_tf_broadcaster.py和scripts/py_tf_broadcaster02.py给出了示例程序,详见如下。
py_tf_broadcaster.py
#!/usr/bin/env python
# -*- coding:utf-8 -*-
import rospy
import math
import tf
if __name__ == '__main__':
rospy.init_node('py_tf_broadcaster')
print '讲解tf.transformBroadcaster类'
print '第1种发布方式:sendTransform(translation,rotation,time,child,parent)'
#第一部分,发布sendTransform(translation,rotation,time,child,parent)
br = tf.TransformBroadcaster()
#输入相对原点的值和欧拉角
x=1.0
y=2.0
z=3.0
roll=0
pitch=0
yaw=1.57
rate = rospy.Rate(1)
while not rospy.is_shutdown():
yaw=yaw+0.1
br.sendTransform((x,y,z),
tf.transformations.quaternion_from_euler(roll,pitch,yaw),
rospy.Time.now(),
"base_link",
"link1") #发布base_link到link1的平移和翻转
rate.sleep()py_tf_broadcaster02.py
#!/usr/bin/env python
# -*- coding:utf-8 -*-
import rospy
import geometry_msgs.msg
import tf2_ros.transform_broadcaster
import math
import tf
if __name__ == '__main__':
rospy.init_node('py_tf_broadcaster')
print '讲解tf.transformBroadcaster类'
print '第2种发布方式:sendTransformMessage(transform)'
#第二部分,发布sendTransformMessage(transform)
m=tf.TransformBroadcaster()
t = geometry_msgs.msg.TransformStamped()
t.header.frame_id = 'base_link'
t.header.stamp = rospy.Time(0)
t.child_frame_id = 'link1'
t.transform.translation.x = 1
t.transform.translation.y = 2
t.transform.translation.z = 3
t.transform.rotation.w=1
t.transform.rotation.x=0
t.transform.rotation.y=0
t.transform.rotation.z=0
#输入相对原点的值和欧拉角
rate = rospy.Rate(1)
while not rospy.is_shutdown():
m.sendTransformMessage(t)
rate.sleep()
8.4.5 TF相关工具命令
根据当前的tf树创建一个pdf图:
$ rosrun tf view_frames
这个工具首先订阅
/tf,订阅5秒钟,根据这段时间接受到的tf信息,绘制成一张tf tree,然后创建成一个pdf图。查看当前的tf树:
$ rosrun rqt_tf_tree rqt_tf_tree
该命令同样是查询tf tree的,但是与第一个命令的区别是该命令是动态的查询当前的tf tree,当前的任何变化都能当即看到,例如何时断开何时连接,捕捉到这些然后通过rqt插件显示出来。
查看两个frame之间的变换关系:
$ rosrun tf tf_echo[reference_frame][target_frame]
8.5 统一机器人描述格式URDF
8.5.1 URDF基础
URDF(Unified Robot Description Format)统一机器人描述格式,URDF使用XML格式描述机器人文件。URDF语法规范,参考链接:http://wiki.ros.org/urdf/XML,URDF组件,是由不同的功能包和组件组成:
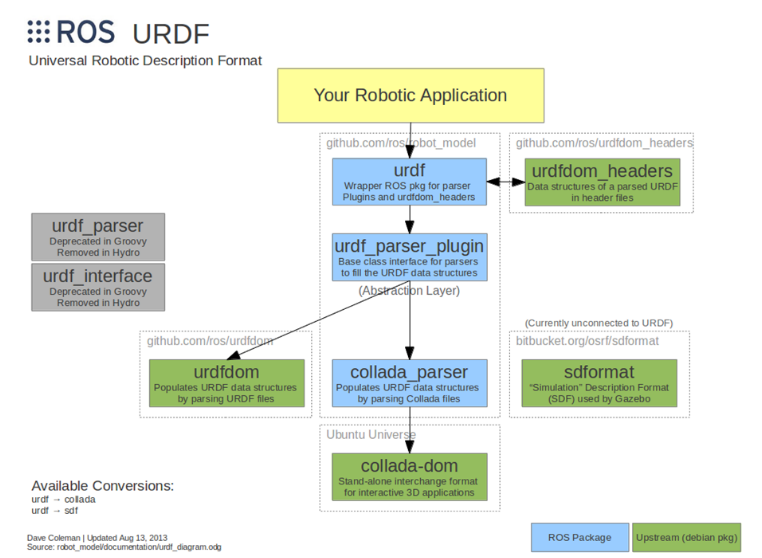
其中urdf_parser和urder_interface已经在hydro之后的版本中去除了。urdf_paser_plugin是URDF基础的插件,衍生出了urdfdom(面向URDF文件)和collar_parser(面向相互文件)。在URDF当中,当你想要描述一个机器人的时候,例如小车的base_link和右轮right,两个link之间需要joint来连接。参考下图:
8.5.2 制作URDF模型
(1)添加基本模型
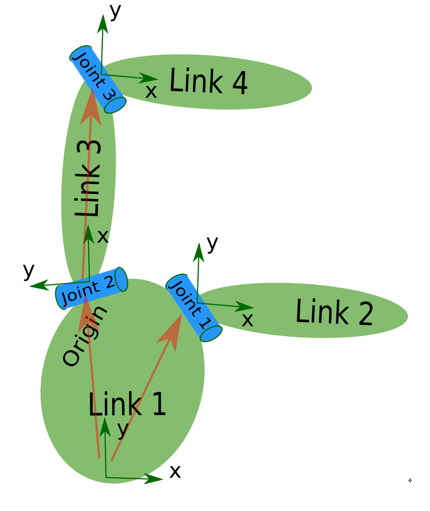
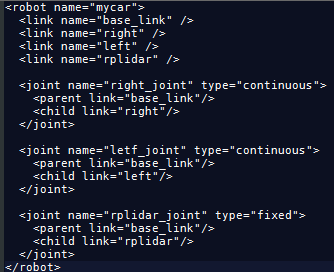
我们以构建一个小车为例子,为大家讲解这部分的内容:(相关的示例代码可以从我们的tf_demo中找到),我们的想法是,首先构建base_link作为小车的父坐标系,然后在base_link基础上,再构建左轮,右轮 和雷达 link. 最后不同的link之间通过joint来连接。参考代码如下:
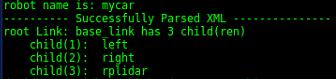
小技巧: sudo apt-get install liburdfdom-tools,安装完毕后,执行检查check_urdf my_car.urdf如果一切正常,就会有如下显示:
随后打开新的终端,输入roslaunch urdf_demo display_urdf_link_joint.launch,回车之后,发现所有的link和joint都在一起了,详见urdf本章的demo。

(2)添加机器人link之间的相对位置关系
在基础模型之上,我们需要为机器人之间link来设相对位置和朝向的关系,URDF中通过<origin>来描述这种关系。
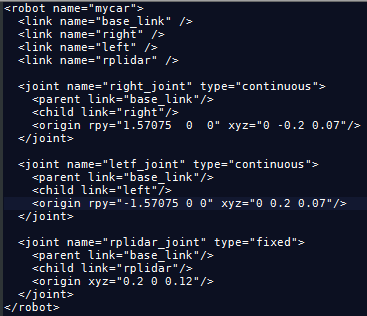
随后打开新的终端,输入roslaunch urdf_demo display_urdf_link_position.launch,回车之后,发现所有的link和joint已经有在固定的位置上了,详见urdf本章的demo。

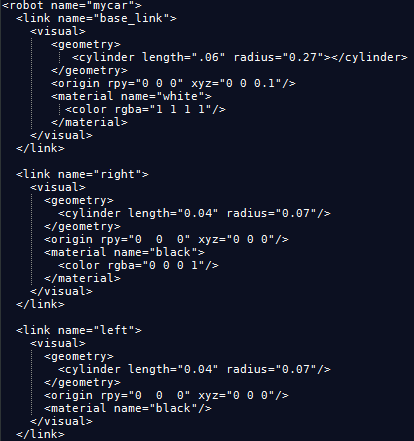
(3)添加模型的尺寸,形状和颜色等
在已经设置好模型的link基础上,添加模型的形状(例如圆柱或长方体),相对于link的位置,颜色等。其中形状用<geometry>来描述,颜色用<color>来描述。
(4)显示URDF模型
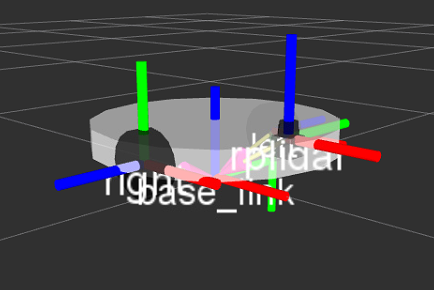
想要在rviz中显示出我们制作好的小车的URDF模型,可以写一个launch文件,参考如下:
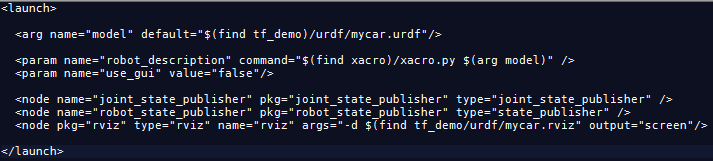
除了launch文件中的前3句,导入我们制作小车的URDF模型外,还需要添加joint_state_publisher和robot_state_publisjer这两个节点。效果如下:
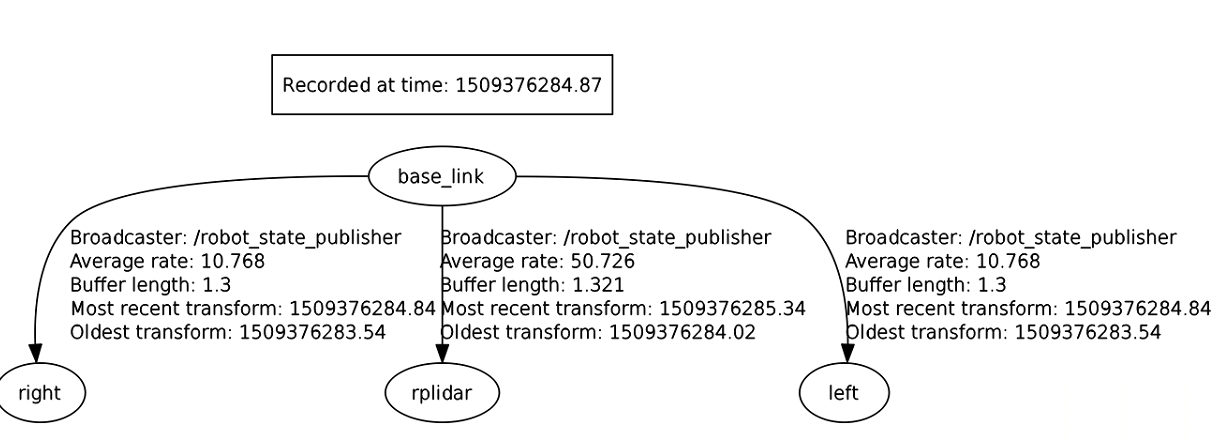
另外,我们可以输入rosrun rqt_tf_tree rqt_tf_tree,可以看到以下tf 树:
小技巧:你可以将launch文件中的param name="use_gui"的值由false改成true会弹出一个窗口,同一移动进度条,可以临时改变joint的朝向。
8.5.3 制作xacro模型
什么是Xacro? 我们可以把它理解成为针对URDF的扩展性和配置性而设计的宏语言(macro language)。有了Xacro,我们就可以像编程一样来写URDF文件。XACRO格式提供了一些更高级的方式来组织编辑机器人描述. 主要提供了三种方式来使得整个描述文件变得简单。
(1)Constants
Usage:<xacro:property name="WIDTH" value="2.0"/>
类似于C语言中的宏定义, 在头部定义后就可以${body_width}进行引用其数值,有了这个,至少我们可以把需要配置的变量进行统一管理和使用。
(2)Macros
Usage:<xacro:macro name="default_origin"> <origin xyz="0 0 0" rpy="0 0 0"/> </xacro:macro> <xacro:default_origin />
Macros是xacro文件中最重要的部分. 就像宏函数一样, 完成一些最小模块的定义, 方便重用, 以及可以使用参数来标识不同的部分.
(3)Include
很多模型都是已宏的形式进行定义, 并以最小集团分成很多个文件. 而最终的机器人描述就变得非常简单了. 下面摘录一个ur5的描述文件. 从中可以看出来xacro的强大优势. 在最后的示例中我们还能够看到, urdf文件也是能够直接导入进来的.
Usage:<?xml version="1.0"?> <robot xmlns:xacro="http://www.ros.org/wiki/xacro" name="ur5" > <!-- common stuff --> <xacro:include filename="$(find ur_description)/urdf/ur5/common.gazebo.xacro" /> <!-- ur5 --> <xacro:include filename="$(find ur_description)/urdf/ur5/ur5.urdf.xacro" /> <!-- arm --> <xacro:ur5_robot prefix="" joint_limited="false"/> <link name="world" /> <joint name="world_joint" type="fixed"> <parent link="world" /> <child link = "base_link" /> <origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" /> </joint> </robot>
include类似于C语言中的include, 先将该文件扩展到包含的位置. 但包含进来的文件很有可能只是一个参数宏的定义. 并没有被调用.
举例说明打开新的终端,输入roslaunch urdf_demo display_xacro.launch,回车之后,发现所有的link和joint已经有在固定的位置上了,并且小车颜色和形状已经固定完成,详见urdf本章的demo。
8.5.4 制作gazebo模型
在已经制作好的xcaro模型的基础上,添加gazebo模型的组建,看起已经变得十分的具有可操作性。对于二轮差动模型通过添加libgazebo_ros_diff_drive.so插件对小车左右轮的控制。
<gazebo>
<plugin name="differential_drive_controller" filename="libgazebo_ros_diff_drive.so">
<robotNamespace>/</robotNamespace>
<alwaysOn>true</alwaysOn>
<legacyMode>false</legacyMode>
<updateRate>50</updateRate>
<leftJoint>mybot_left_wheel_hinge</leftJoint>
<rightJoint>mybot_right_wheel_hinge</rightJoint>
<wheelSeparation>${chassisWidth+wheelWidth}</wheelSeparation>
<wheelDiameter>${2*wheelRadius}</wheelDiameter>
<torque>20</torque>
<commandTopic>mybot_cmd_vel</commandTopic>
<odometryTopic>mybot_odom</odometryTopic>
<odometryFrame>odom</odometryFrame>
<robotBaseFrame>mybot_link</robotBaseFrame>
</plugin>
</gazebo>通过添加libgazebo_ros_p3d.so来计算里程。
<gazebo>
<plugin name="ground_truth" filename="libgazebo_ros_p3d.so">
<frameName>map</frameName>
<bodyName>mybot_chassis</bodyName>
<topicName>odom</topicName>
<updateRate>30.0</updateRate>
</plugin>
</gazebo>
最后,对gazebo模型中小车左右轮相关PID等参数进行设置
<gazebo reference="mybot_chassis">
<material>Gazebo/Orange</material>
</gazebo>
<gazebo reference="caster_wheel">
<mu1>0.0</mu1>
<mu2>0.0</mu2>
<material>Gazebo/Red</material>
</gazebo>
<gazebo reference="right_wheel">
<mu1 value="1.0"/>
<mu2 value="1.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="1 0 0"/>
<material>Gazebo/Black</material>
</gazebo>
<gazebo reference="left_wheel">
<mu1 value="1.0"/>
<mu2 value="1.0"/>
<kp value="10000000.0" />
<kd value="1.0" />
<fdir1 value="1 0 0"/>
<material>Gazebo/Black</material>
</gazebo>
</robot>
举例说明打开新的终端,输入roslaunch urdf_demo display_gazebo_rviz.launch,回车之后,发现所有的link和joint已经有在固定的位置上了,并且小车颜色和形状已经固定完成,gazebo界面同样显示正常,详见urdf本章的demo。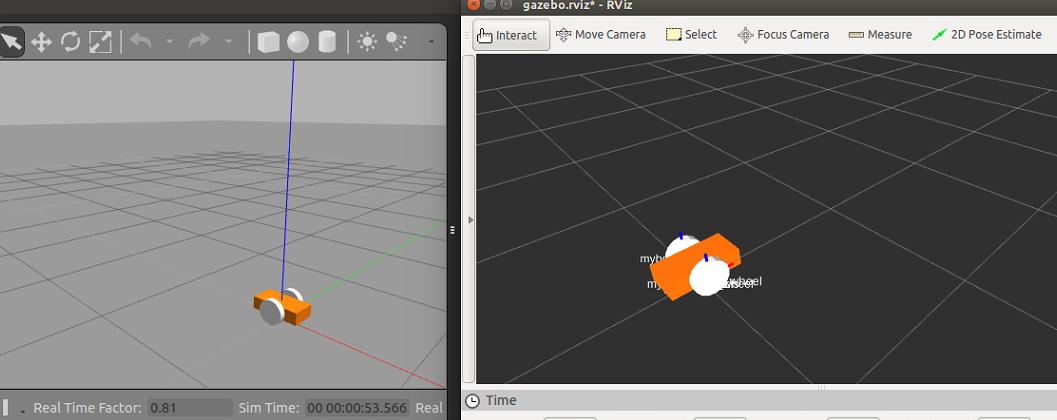
评论