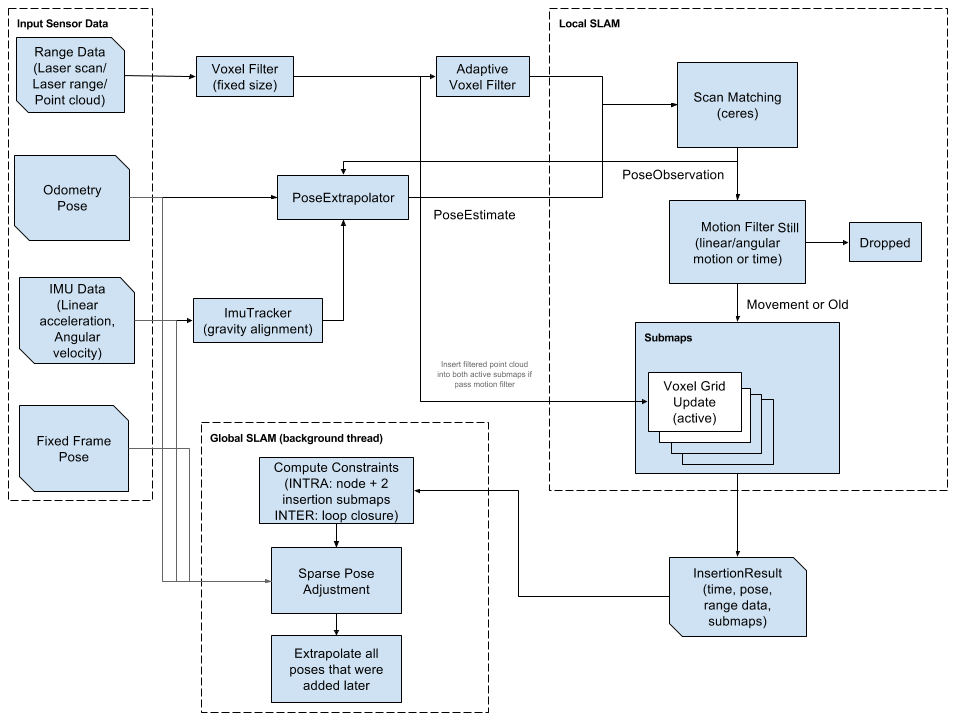
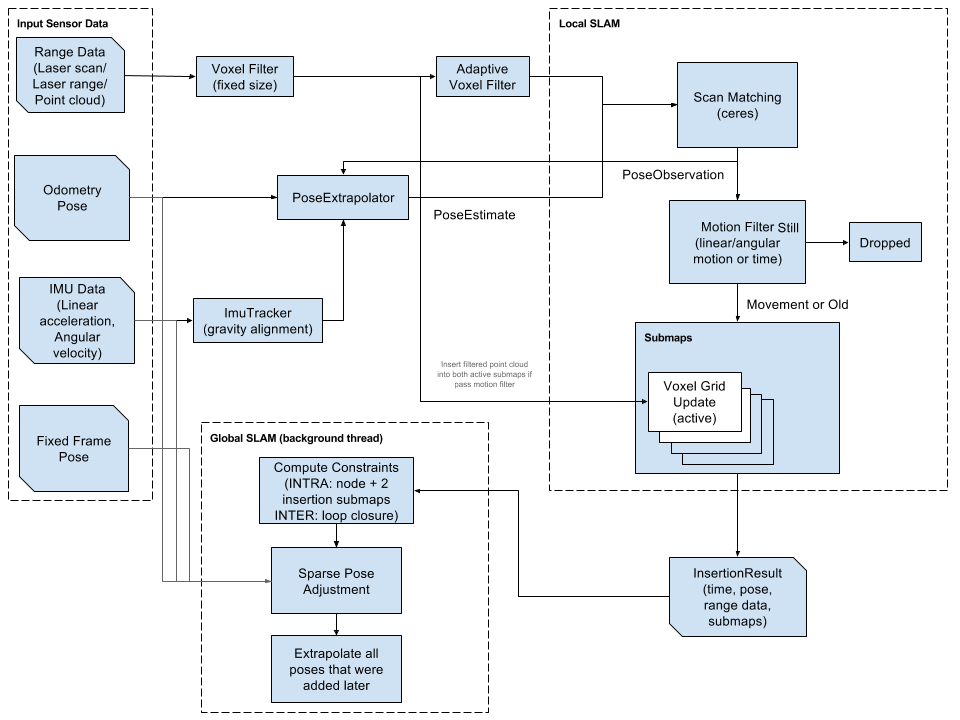
算法调优演练Cartographer 是一个复杂的系统,调优需要充分理解其内部工作原理。本页面旨在直观地概述 Cartographer 所使用的不同子系统及其配置值。如果您对 Cartographer 的更多内容感兴趣,请参阅 Cartographer 论文。该论文仅介绍了 2D SLAM,但对本文中提到的大多数概念进行了严格的定义。这些概念通常也适用于 3D SLAM。W. Hess, D. Kohler, H. Rapp 和 D. Andor, 《2D LIDAR SLAM 中的实时环路闭合》,载于 《机器人与自动化(ICRA)》,2016 IEEE 国际会议。IEEE,2016 年,第 1271-1278 页。概述Cartographer 可以看作是两个独立但又相互关联的子系统。第一个是本地 SLAM(有时也称为前端或本地轨迹构建器)。它的作用是构建一系列子图。每个子图都应保持局部一
在自己的数据包上运行 CartographerROS¶现在,您已经在几个提供的袋子上运行了 Cartographer ROS,可以继续让 Cartographer 使用您自己的数据了。找到一个您想用于 SLAM 的.bag记录,然后阅读本教程。警告当你想运行 cartographer_ros 时,可能需要先运行source install_isolated/setup.bash(如果你的 shell 是 zsh,请将 bash 替换为 zsh),为你的 ROS 环境添加源代码。验证您的包Cartographer ROS 提供了一个名为cartographer_rosbag_validate的工具,用于自动分析工具包中的数据。一般来说,在尝试调整 Cartographer 以纠正错误数据之前,最好先运行该工具。该工具得益于 Cartographer 作者的经验,可以检测出数据包中常见的各种错
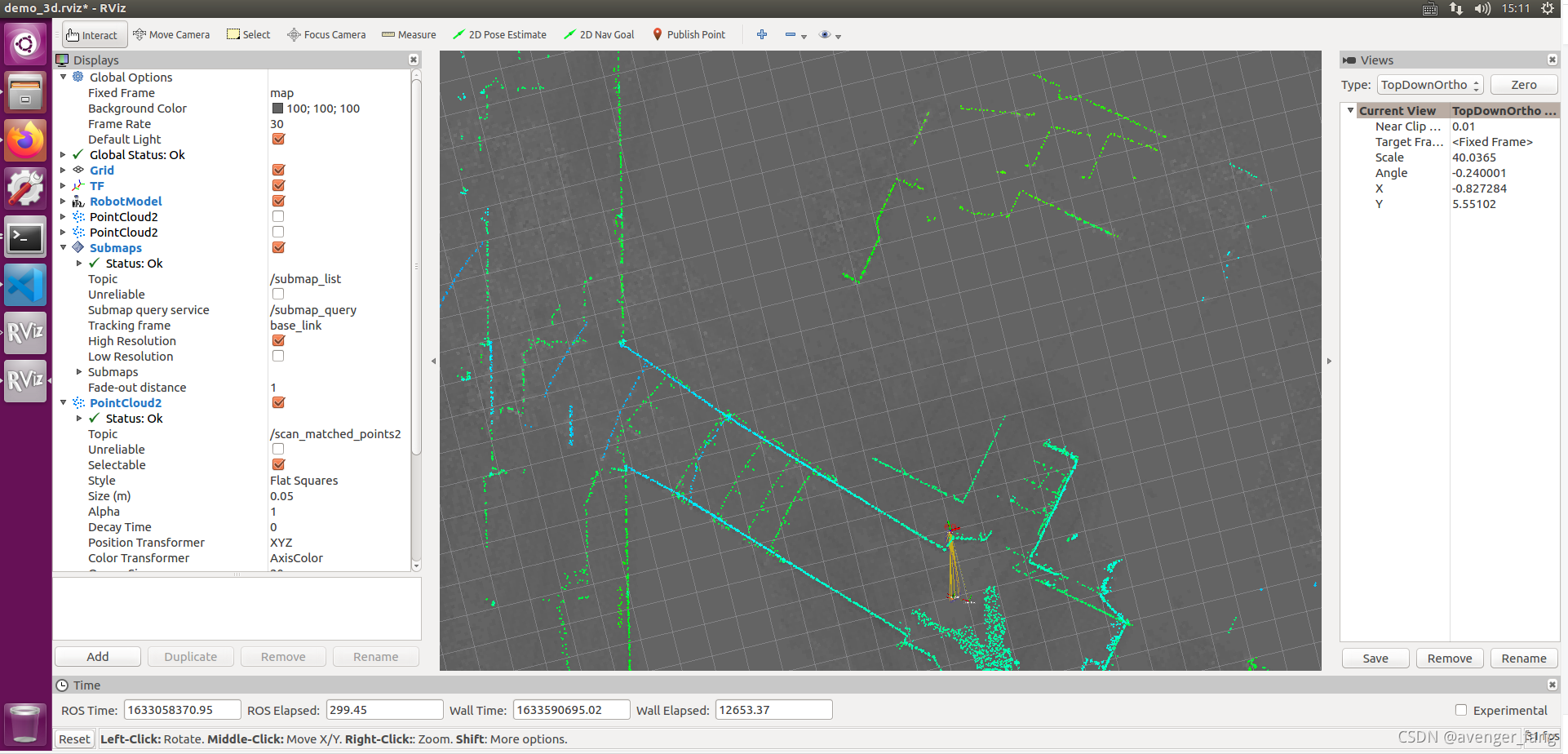
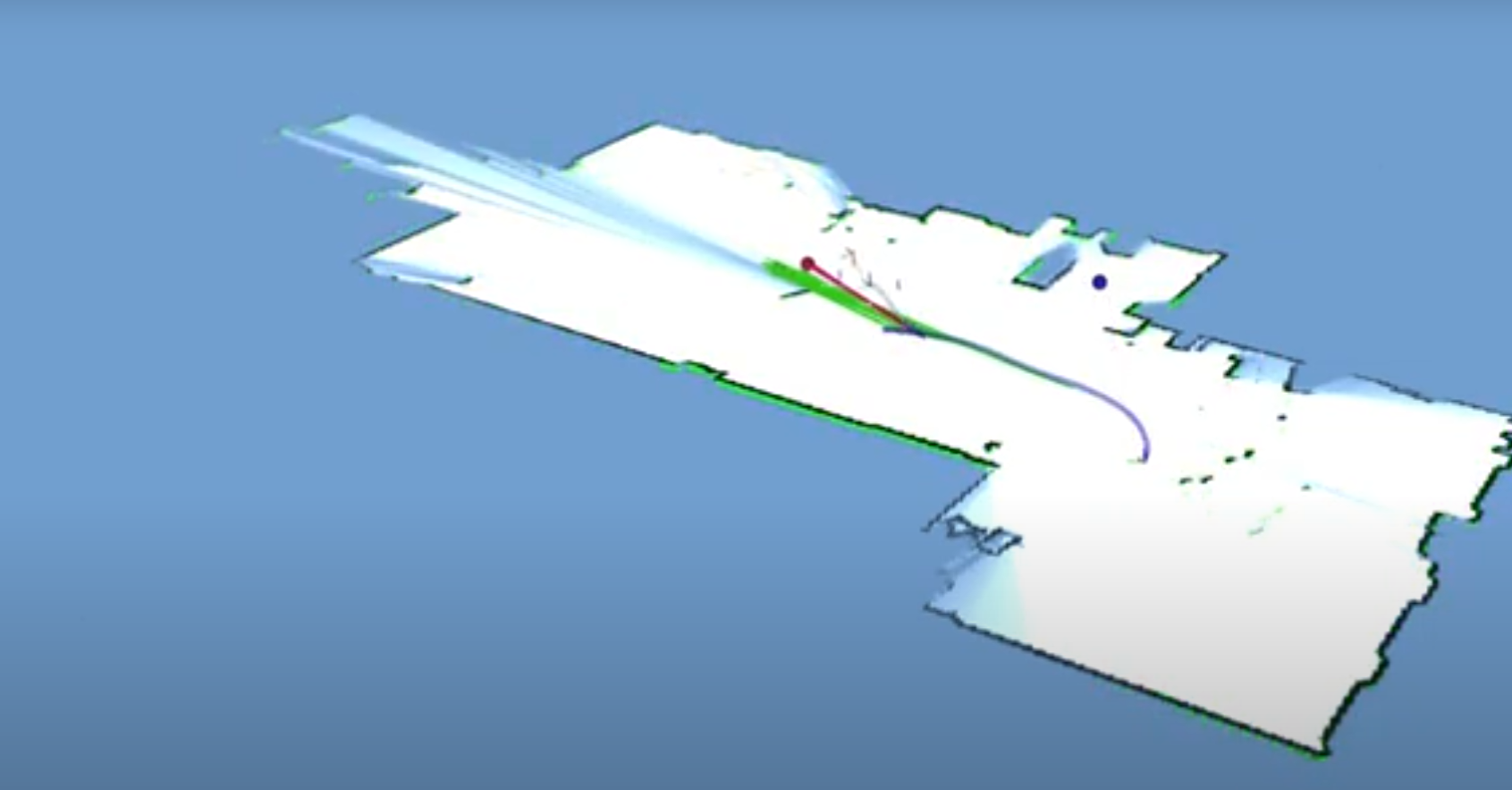
在演示包上运行制图师ROS¶现在,Cartographer 和 Cartographer 的 ROS 集成已经安装完毕,您可以将示例包(例如德意志博物馆的 2D 和 3D 背包系列)下载到一个已知位置,在本例中为~/Downloads,然后使用roslaunch 启动演示包。启动文件会自动调用roscore和rviz。警告当你想运行 cartographer_ros 时,可能需要先运行source install_isolated/setup.bash(如果你的 shell 是 zsh,请用 zsh 代替bash),为你的 ROS 环境添加源代码。德意志博物馆下载并启动 2D 背包演示:wget -P ~/Downloads <https://storage.googleapis.com/cartographer-public-data/bags/backpack_2d/cartog
安装Cartographer依赖在Ubuntu 20.04上安装Cartographer所需的依赖项,可以使用以下命令:sudo apt-get install \ clang \ cmake \ g++ \ git \ google-mock \ libboost-all-dev \ libcairo2-dev \ libcurl4-openssl-dev \ libeigen3-dev \ libgflags-dev \ libgoogle-glog-dev \ liblua5.

1 介绍1.1 概述Cartographer是一款可以跨多个平台和传感器配置提供2D和3D实时同步定位和绘图(SLAM)的系统。这个项目提供了Cartographer的ROS集成。Cartographer是google推出的一套基于图优化的SLAM算法。Cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检