1 介绍1.1 概述Cartographer是一款可以跨多个平台和传感器配置提供2D和3D实时同步定位和绘图(SLAM)的系统。这个项目提供了Cartographer的ROS集成。Cartographer是google推出的一套基于图优化的SLAM算法。Cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检

1 介绍
1.1 概述
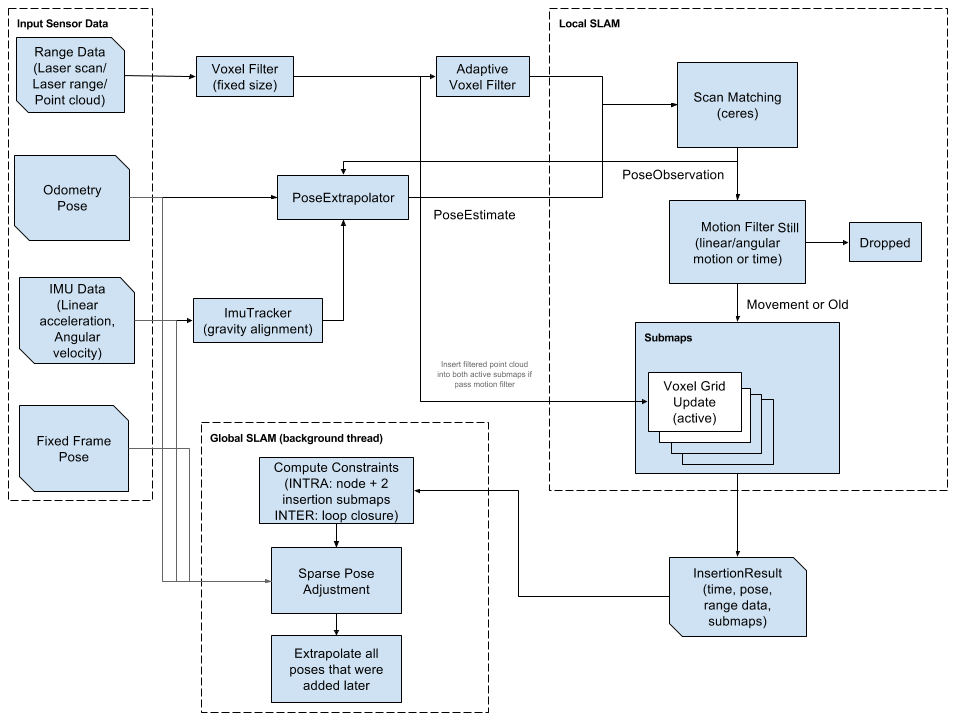
Cartographer是一款可以跨多个平台和传感器配置提供2D和3D实时同步定位和绘图(SLAM)的系统。这个项目提供了Cartographer的ROS集成。Cartographer是google推出的一套基于图优化的SLAM算法。Cartographer算法并没有给人惊艳的感觉,但该算法的主要目标是实现低计算资源消耗,达到实时SLAM的目的。该算法主要分为两个部分,第一个部分称为Local SLAM, 该部分通过一帧帧的Laser Scan建立并维护一系列的Submap,而所谓的submap就是一系列的Grid Map。当再有新的Laser Scan中会通过Ceres Scan Matching的方法将其插入到子图中的最佳位置。但是submap会产生误差累积的问题,因此,算法的第二个部分,称为Global SLAM的部分,就是通过Loop Closure来进行闭环检测,来消除累积误差:当一个submap构建完成,也就是不会再有新的laser scan插入到该submap时,算法会将该submap加入到闭环检测中。闭环检测的本质也是一个优化问题,该优化问题被表达成了一个pixel-accurate match的形式,解决优化问题的方法是Branch-and-Bound Approach.Cartographer本身是一个C++的库,虽然可以不依赖ROS的环境运行,但为了快速的上手,google还是提供了一个ROS环境下的封装cartographer_ros。
1.2 评价
我认为Cartographer这个库最重要的东西还不是算法,而是实现。 2D/3D的SLAM的核心部分仅仅依赖于以下几个库:
Boost:准标准的C++库。
Eigen3: 准标准的线性代数库。
Lua:非常轻量的脚本语言,主要用来做Configuration
Ceres:这是Google开源的做非线性优化的库,仅依赖于Lapack和Blas
Protobuf:这是Google开源的很流行的跨平台通信库
没有PCL,g2o, iSAM, sophus, OpenCV, ROS 等等,所有轮子都是自己造的。这明显不是搞科研的玩儿法,就是奔着产品去的。前面说过,算法需要的计算资源少,而且因为依赖很少,因此几乎可以直接应用在一个产品级的嵌入式系统上。以前学术界出来的开源2D/3D SLAM算法不少,但能几乎直接拿来就用在产品上的,恕我孤陋寡闻还真想不出来。因此,我认为进入相关领域SLAM算法的门槛被显著降低了。
1.3 特点
工程化代码,依赖少,算法设计精妙,能在嵌入式主控上运行。适合产品级应用;
支持 ROS
优秀的软件架构设计,便于接入IMU、(单/多线)雷达、里程计、甚至为二维码辅助等视觉识别方式也预留了接口(Landmark)。
Cartographer支持2D和3D激光雷达的输入,实现机器人定位,并构建栅格地图。
2D-SLAM:基于2D栅格地图,可以直接用于导航。
3D-SLAM:基于hybridGrid,译为混合概率地图。
2 框架
官方

3 代码结构
heimazaifei 解读

mapBuilder:实现整个地图构建,包括前端local slam和后端 global slam。
轨迹(trajectory): 可以理解为一次SLAM 从起点到终点过程中的机器人行走轨迹,建图中可以通过startTrajectory和finishTrajectory控制。在轨迹生成的过程中,完成sensor到sumap的生成,以及pose_graph的构建。TrajectoryBuilder(globalTrajectory类)主要通过sensor_collator(localTrajecory类)和pose_graph构成 。sensor_collator实现局部地图构建,最终结果传递给pose_graph;
节点图(poseGraph):具体参考图优化的知识。简单理解图优化(如果没接触过图优化,下面估计看不懂,后续会详细讲):每个插入的激光和生成sumap,以及landmark(后续讲)都可以理解为图优化的一个节点,建图过程中,生成这些点之间的关系,这些关系便是图中的线,最终优化,就是调整点的位置,得到最优值。可以理解为PoseGraph主要实现全局优化(global slam)功能。
代码流程:最终代码运行通过ROS node 方式实现。node中对应topic和service订阅和发布等功能通过MapBuilderBridge类实现。MapBuilderBridge顾名思义,实现ROS节点代码和cartographer功能代码之间的桥接,也可以理解为对cartographer主体代码的接口封装。cartographer主体代码主要功能通过构建地图MapBuilder类实现。此外,MapBuilderBridge 还包含sensorBridge类,实现传感信息ros格式和cartographer自定义格式之间的转换,这些传感器主要包括scan,imu,odom,tf 等。
linyicheng 解读
https://github.com/linyicheng1/OpenSLAM-Notes/tree/main/cartographer-master

Xiaotu 解读
https://gaoyichao.com/Xiaotu/?book=Cartographer%E6%BA%90%E7%A0%81%E8%A7%A3%E8%AF%BB&title=index
cartographer_ros
地图构建器map_builder
实际完成地图构建的就是在系统运行之初所构建的map_builder对象。 它是Catographer的顶层对象, 为用户提供了一套统一的接口MapBuilderInterface。 封装了对象pose_graph_和trajectory_builders_来分别完成闭环检测和子图构建。还构建了一个具有固定数量的线程池,用于管理多线程。
| 重点 | 说明 |
|---|---|
| 初识map_builder | 本文中通过对map_builder对象的分析,我们可以看到它用对象pose_graph_在后台完成闭环检测和全局的地图优化,并用trajectory_builders_在前台跟踪运动轨迹完成局部的子图构建。 |
| map_builder的接口实现 | 本文中我们简单看了一下map_builder对象的接口实现,重点分析了AddTrajectoryBuilder函数,看到实际完成局部建图任务的是一个LocalTrajectoryBuilder2D类型的对象, 而与轨迹规划器相关的类型还有CollatedTrajectoryBuilder、GlobalTrajectoryBuilder、TrajectoryBuilderInterface它们应该说是一种封装。 |
| 连接前端与后端的桥梁——GlobalTrajectoryBuilder | 我们会在GlobalTrajectoryBuilder的成员变量中,看到了前端和后端的核心LocalTrajectoryBuilder2D和PoseGraph2D。 也将在它处理点云数据的接口中,看到该类是如何把前端的输出结果喂给后端的。 |
Local SLAM
实际完成Local SLAM的扫描匹配、更新子图的功能是在类LocalTrajectoryBuilder2D中完成的。 扫描匹配负责根据地图信息和激光扫描数据估计机器人的位姿,然后根据位姿估计将传感器数据插入到子图中。不断的重复这两个过程就可以得到一个较为准确的地图, 但是对于比较大的场景每次扫描匹配都对整个地图进行搜索的话,其计算量太大。出于实时性的考虑Cartographer只在一个较小的子图中完成这一更新过程,所以是Local SLAM。 在一些资料中被称为前端。
| 重点 | 说明 |
|---|---|
| Local SLAM的核心——LocalTrajectoryBuilder2D | 本文中,通过对类LocalTrajectoryBuilder2D的分析,大体上能够找到进行Local SLAM的一些核心要素以及实现这些要素的对象。 走到这里,我们终于看到了算法的一点影子了。 |
| 子图的维护与封装 | 本文中,我们顺着LocalTrajectoryBuilder2D中维护的子图对象active_submaps_,分析其数据类型ActiveSubmaps2D,以及封装子图的类Submap2D。 ActiveSubmaps2D使用了一种类似双缓存的机制,在旧图上进行扫描匹配,同时孕育着新图。 |
| 占用栅格的数据结构 | 子图也是一种占用栅格形式的地图,本文从ProbabilityGrid开始分析占用栅格的数据结构和接口。将会看到Cartographer通过查表的方式更新栅格单元的占用概率。 |
| 查找表与占用栅格更新 | 本文中我们分析插入器对象range_data_inserter_,介绍栅格单元占用概率的更新原理,并详细分析查找表的构建和使用方法。 |
| Local SLAM的业务主线——AddRangeData | 本文中我们将详细分析类LocalTrajectoryBuilder2D的成员函数AddRangeData,以及它直接或者间接调用的函数,具体完成了扫描匹配、更新子图的任务。 |
| 基于Ceres库的扫描匹配器 | 本文我们将简单的介绍使用Ceres库的套路。再分析扫描匹配器CeresScanMatcher2D,研究它是如何评价激光扫描数据与栅格地图的匹配程度的。 |
| 基于实时相关性分析的扫描匹配器 | 这个扫描匹配器的作用是初步优化位姿估计器输出的位姿估计,给Ceres匹配器提供一个较好的迭代初值。 由于可以通过配置文件选择关闭它,暂时不详细分析,等整体分析完Cartographer,介绍了闭环检测之后再补上。 |
Global SLAM
Global SLAM在后端为Cartographer提供闭环检测全局优化的功能。它的主要工作有三个方面:(1) 通过闭环检测构建子图与路径节点之间的约束关系,进而描述成一个位姿图。 (2) 然后通过SPA(Sparse Pose Adjustment)在后台进行优化。(3) 由于这个SPA优化是一个很耗时的过程,期间前端可能会产生新的子图和路径节点,所以在完成一次优化之后应当调整新增的路径节点的位姿估计。
| 重点 | 说明 |
|---|---|
| Global SLAM的核心——PoseGraph2D | 在Cartographer中的位姿图是由轨迹节点和子图构成的二部图,图中的约束描述的是轨迹节点与子图之间的位置关系。后端优化就是估计轨迹节点与子图在世界坐标系下的位姿, 最小化全局估计与局部估计之间的偏差。本文我们将研究一下PoseGraph2D的成员变量,以及与位姿图相关的一些数据结构。 |
| 位姿图的创建与更新 | 本文我们将详细分析位姿图PoseGraph2D的构造与更新过程。将看到PoseGraph2D通过对象constraint_builder_在后台完成闭环检测构建约束。 它还有一个工作队列来协调后台的任务。 |
| 约束构建器——constraint_builder_ | 本文中我们将详细分析约束构建器constraint_builder_,将看到它是如何通过MaybeAdd-WhenDone调用循环,借助线程池来组织闭环检测和约束的并行计算。 |
| 分支定界闭环检测的原理和实现 | Cartographer使用类FastCorrelativeScanMatcher2D具体实现了深度优先的分支定界搜索算法,该算法能够高效地进行扫描匹配,计算路径节点与子图之间的约束关系。 |
| 后端优化过程 | 本文我们将回到Global SLAM的系统框图,来了解经过闭环检测构建了子图与路径节点之间的约束之后,都做了些什么工作。 通过简要的分析后端优化求解器的数据结构以及基于Ceres库进行SPA(Sparse Pose Adjustment)的优化方法,来了解后端优化的过程。 |
赵锴 解读
SLAM学习笔记(十九)开源3D激光SLAM总结大全——Cartographer3D,LOAM,Lego-LOAM,LIO-SAM,LVI-SAM,Livox-LOAM的原理解析及区别
地图设计
Cartographer的地图(map)以子地图(submap)的形式组成。
分为前端和后端。 前端:根据帧间匹配算法(scan-match),实时根据激光(scan)来推测累积的scan相对于submap的位姿。 后端:检测回环(发现在已到达的位置附近),修正各个submap之间的位姿。
根据代码可以判断,2D和3D基于的是同一套思路,但是在实现上有一定区别。 接下来结合2D和3D部分,对比介绍实现定位和建图的方法。
在介绍定位和建图思路之前,先介绍一下地图的更新方式:

发出一束激光,打到一个障碍物点,被打到的称为hit点,中间连线上的空区域,称为miss点。
2d和3d都是存储的这样的地图。3d相当于是3维的栅格地图。
宏观上:多次观测到,提升其概率。
\frac{p}{1-p} odds(p)\=1−pp M n e w ( x ) = c l a m p ( o d d s − 1 ( o d d s ( m o l d ( x ) ) . o d d s ( p h i t ) ) ) M_{new}(x)=clamp(odds^{-1}(odds(m_{old}(x)).odds(p_{hit}))) Mnew(x)\=clamp(odds−1(odds(mold(x)).odds(phit)))
p表示占据概率,当p=0.5时,概率比值odds=1,表示占据和空闲各占一半。 o d d s − 1 odds^{-1} odds−1表示函数逆运算。
p h i t = 0.55 p_{hit}=0.55 phit\=0.55代表该位置被激光打到一次的概率,第一次观测会被直接赋值。
M n e w ( x ) M_
初始时刻,栅格未知状态,激光第一次打到了位置 x 处,M(x)概率更新为0.55。
随后,激光第二次重复打到了同一个位置: o d d s ( p h i t ) = 0.55 1 − 0.55 = 1.22 odds(p_{hit})=\frac{0.55} {1-0.55}=1.22 odds(phit)\=1−0.550.55\=1.22, o d d s ( M o l d ( x ) ) = o d d s 0.55 = 1.22 odds(M_{old}(x))=odds_{0.55}=1.22 odds(Mold(x))\=odds0.55\=1.22 o d d s ( p h i t ) odds(p_{hit}) odds(phit) 和 o d d s ( M o l d ( x ) ) odds(M_{old}(x)) odds(Mold(x)) 相乘为1.484,再求函数逆运算,恢复出更新后的 M n e w ( x ) = 0.597 M_{new}(x)=0.597 Mnew(x)\=0.597。
实际代码中,采用了多种工程技巧加速运算。包括:映射到整数范围,预计算,查表等方法,此处不深入展开了。
匹配方法
scan-scan: 这个意味着利用两帧激光数据(每帧激光束的数目相同),计算二者之间的变换。典型方法:ICP。 scan-map: 利用一帧激光数据和地图数据,找到激光数据在地图中的位置。 map-map: 利用一个子地图数据,在一个更大的地图中找到它合适的位置。
2D和3D的前端,Cartographer采用的是scan-map的匹配方法。
不管是2D还是3D,首先要有一个初始的位姿,在此基础上进行优化:
有IMU,则采纳其角速度积分作为初始姿态。不信任IMU任何加速度信息。
有里程计,则采纳里程计的线速度积分作为初始平移。
二者都没有,根据之前的运动做一个匀速的假设。
在得到了初始位姿以后,初始位姿要经过第一阶段解算:CSM(Correlation Scan Match 相关扫描匹配)——构建似然场。
即对原先的地图map进行一个高斯模糊,让它膨胀一些,然后把激光scan在一个搜索窗口内暴力匹配,计算得分。
注意,这里有两个问题: 1.得分怎么算? 如果scan的点落在障碍物模糊区域内,落的越多,得分越高。 2.地图不是无限大的吗,你怎么保证在搜索窗口里就能找到位姿呢? 因为有初始位姿。误差肯定在一个范围内而不会马上发散到很远,所以可以在一个位姿的窗口内,对位姿进行暴力匹配搜索。(初始位姿估计中,里程计数据不会突然激增;imu的加速度信息会漂移,但是算法对于imu加速度数据选择直接丢弃不看;而根据之前位姿匀速假设也不会飘走)
这时候我们就要考虑:
什么是位姿?位置+姿态。
对于2D SLAM而言,有三个变量,x,y,yaw角。 对于3D SLAM而言,有x,y,z,roll,pitch,yaw六个变量。
2dslam中,采用三层循环,(最外层为θ,减小sin和cos的频繁计算),对x,y,θ在给定大小的搜索窗口内进行穷举,计算最高得分的x,y,θ作为一阶段解算的输出位姿。
3dslam中,采用六层循环,对x,y,z,roll,pitch,yaw六个变量在搜索窗口内穷举,计算得分最高的作为一阶段解算输出位姿。
很显然,3d-slam的这种方式对于计算资源依赖较大,复杂度达到O(n^6)级别。因此3d-slam的CSM方法,作为一个配置选项,默认是不开启的。当然如果用户机器比较牛逼,也可以选择开启。
二阶段解算
我们可以看出,第一阶段CSM解算中,位姿在其中是一个离散的变量,通过暴力枚举获得输出结果;
但是暴力枚举也是存在分辨率的,例如:如果角度步长设为1度,但如果刚好真正的角度是5.5度,那么CSM只能搜索到5或6度,而无法进一步细化,逐步累积将会造成误差。 因此,引入第二阶段位姿解算:非线性优化。
E ( T ) = a r g m i n T ∑ [ 1 − M ( S i ( T ) ) ] 2 E(T)=arg \mathop{min} \limits_{T}\sum[1-M(S_i(T))]^2 E(T)\=argTmin∑[1−M(Si(T))]2
S i ( T ) Si(T) Si(T) 表示把激光数据 S 用位姿 T 进行转换, M(x) 表示得到坐标 x 的地图占用概率。
思路:S代表了激光击中障碍物,将激光点在机器人坐标系下的位置,经过T转换到世界坐标系下以后,应该尽可能的落在已有地图的障碍物上。
第二阶段的位姿求解,显然位姿在其中是一个连续的变量,通过梯度下降的方法求解目标函数。 由于地图是离散的,因此需要对地图进行插值处理,使地图也变成一个可以求导的连续变量,这样才能优化前述目标函数。

[x0, x1] 区间内某一位置 x 在直线上的y值;
双线性插值本质上就是在两个方向上做线性插值。

阅读比较了代码,我判断2D和3D对于此部分内容基本相同。
2D:三个误差项:位姿转换误差+ 旋转误差+平移误差 ,后二者限制了旋转和平移的修改不能距离初始位姿太大。
3D:四个误差项:低分辨率位姿转换误差+ 高分辨率位姿转换误差+旋转误差+平移误差。低分辨率位姿转换误差权重低于高分辨率。
旋转和平移的权重也可以在配置文件中调参。
后端
Cartographer 在后端主要寻找回环,并根据建立的约束对所有的sumap进行统一优化。
回环检测目的是:检测当前位置是否曾经来过,即采用当前scan在历史中搜索,确认是否匹配。
为什么要有回环检测呢?原因有二:1. 已有地图时位姿初始化,不知道当前帧初始位姿,也就不清楚在地图中哪个位置,无法做定位。 2.有累积误差,仅靠前端递推,不进行修正的话,地图很容易变形。
因此接下来我们探讨两个问题:1.如何检测回环。2.检测回环后该怎么做。
如何检测回环
检测回环和前端的思路也比较相似,先通过穷举暴力匹配,再通过优化精细修正。
但是,前端的暴力穷举,是在有个初始位姿的基础上在一个小窗口内穷举。
后端重定位,没有初始位姿了,暴力匹配的范围变成了整个地图。
因此必须采用算法加速处理:多分辨率地图+分支定界操作。
假设有一帧激光:
评论