Pi0原理介绍
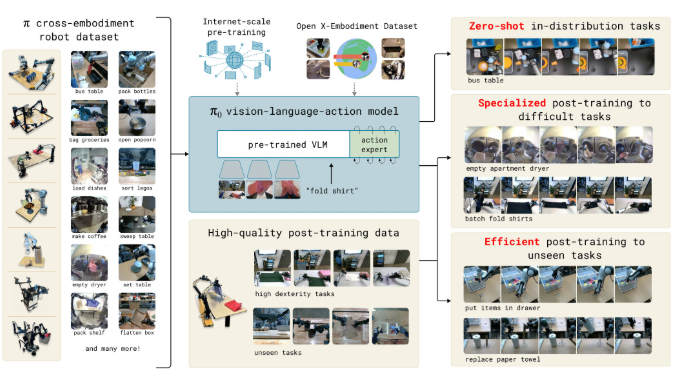
Pi0原理介绍一、Pi0 简介下面的原理介绍,基于 Pi0 论文,知识点较多,如果有谬误,欢迎反馈。论文地址:https://arxiv.org/pdf/2410.24164v1项目官网:https://www.physicalintelligence.company/blog/pi0我们使用的代码库:https://github.com/Physical-Intelligence/openpiblankπ0 是一个通用机器人策略模型(机器人基础模型),旨在解决机器人学习中的三大核心挑战:数据稀缺、泛化能力不足和鲁棒性问题。该模型采用类似大语言模型的训练范式,通过大规模预训练获得广泛的机器人操作能力,然后通过后训练适应特定任务。主要特点:支持零样本控制和语言指令跟随能够处理复杂的多阶段任务(如叠衣服、收拾桌子、组装盒子等)支持跨实体部署(7 种不同机器人配置)具备高频率精密操作能力(最高

阅读 16
评论 0
收藏 0