
用于机器人技术的 Python第 1 单元 课程介绍- 摘要预计完成时间15 分钟本课程是关于学习 Python 的。但不仅仅是作为计算机编程语言的 Python,而是作为未来机器人编程工具的 Python!本单元是机器人 Python课程的介绍。您将对课程中将要涉及的内容进行快速预览,还将使用模拟机器人进行 Python 的首次练习。因此,在本课程中,我们将向您展示开始使用 Python 进行机器人编程所需的基本主要概念。学完这门课程后,您就可以顺利地学习 The Construct 的其他课程(基于 Python 的课程)。更新:在学习本课程的同时,您还有机会在我们的真实机器人实验室(Real Robot Labs)中使用真实机器人 TurtleBot3。本课程的最终项目将在真实机器人上完成。在真实机器人上完成最终项目后,将获得本课程的证书!很激动人心吧?更多详情,请参阅本单元结尾!-

![]()
第 1 单元 课程介绍
- 摘要
预计完成时间15 分钟
本课程是关于学习 Python 的。但不仅仅是作为计算机编程语言的 Python,而是作为未来机器人编程工具的 Python!
本单元是机器人 Python课程的介绍。您将对课程中将要涉及的内容进行快速预览,还将使用模拟机器人进行 Python 的首次练习。
因此,在本课程中,我们将向您展示开始使用 Python 进行机器人编程所需的基本主要概念。学完这门课程后,您就可以顺利地学习 The Construct 的其他课程(基于 Python 的课程)。
更新:在学习本课程的同时,您还有机会在我们的真实机器人实验室(Real Robot Labs)中使用真实机器人 TurtleBot3。本课程的最终项目将在真实机器人上完成。在真实机器人上完成最终项目后,将获得本课程的证书!很激动人心吧?更多详情,请参阅本单元结尾!
- 摘要结束
1.1 为什么要学习 Python?
如果您想成为机器人开发人员,就需要学习 Python。机器人开发人员是为机器人创建软件的程序员。他们是机器人智能的构建者。这是机器人技术中最难的工作
Python 是与 C++ 并列的最流行的机器人编程语言。不过,Python 在机器人领域赢得的空间一年比一年大。特别是在机器人研究领域,Python 是首选语言之首。
用于机器人技术的许多人工智能库都是用 Python 编写的:、 的学习库、、等。
最后,如果您想成为一名机器人开发人员,就需要学习 ROS。即使 ROS 可以使用 Python 或 C++ 编程,但学习 ROS 最快、最简单的方法还是使用 Python。我们建议您选择这条路。
1.2 开始练习吧!
在做了适当的自我介绍后,现在是真正开始的时候了。而且......在机器人点火学院,我们总是从练习开始!
让我们创建一个简单的 Python 程序来控制模拟的机械臂。
1.2.1 创建第一个 Python 程序
Python 程序在文本文件中创建,使用终端执行。
现在,让我们创建第一个真正的 Python 程序来控制机器人,并使用终端执行。
- 演示 1.1 -
创建第一个 Python 程序
进入集成开发环境,选择
src文件夹,在catkin_ws.
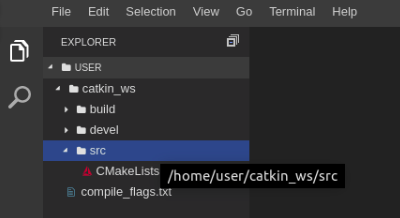
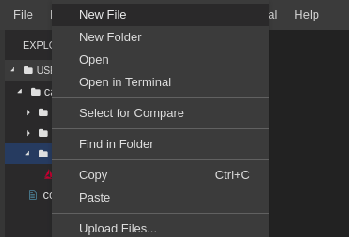
右键单击,然后选择
New File(如下图所示)
写下我们要创建的 Python 程序的名称:
arm_control.py
注意:所有 Python 程序的文件扩展名必须为 .py
文件
arm_control.py文件应该会在集成开发环境中自动打开。文件应该是空的。如果文件未自动打开或已关闭,只需双击集成开发环境导航区中显示的文件即可。复制下图所示代码,并将其粘贴到集成开发环境中的
arm_control.py文件中。
恭喜您!您已经创建了第一个 Python 程序!
arm_control.py
在 [ ] 中:
from robotarm_move_pkg.move import RobotActionExecutor
import time
executor = RobotActionExecutor()
executor.execute_action(action_name="move") # Default action: "move"
print(f"✅ END")
执行第一个 Python 程序
现在,让我们像通常执行 Python 程序那样来执行这个程序。为此,我们将使用 IDE 下方的终端(我们也称它们为WebShell)。
在 Shell #1 中执行
键入以下命令,只是为了确保你的 Python 程序在那里:
在 [ ] 中:
cd /home/user/catkin_ws/src
在 [ ] 中:
ls
您应该会看到 Python 程序列在那里。要执行 Python 程序,请键入
在 [ ] 中:
python arm_control.py
输入前一条命令后,您将执行创建的 Python 程序来控制机械臂。机械臂必须完成一系列动作。
恭喜您您已经执行了第一个 Python 程序!!
执行程序后,您应该会看到模拟中的机械臂是这样运动的:
如你所见,代码是用 Python 编写的,用于控制机械臂。如果您现在不理解代码,也不用担心。本课程结束后,您就能理解了。
- 演示版 1.1 - 结束
上次练习中的重要事项:
您创建的每个 Python 程序都必须遵循名称约定 <your−program−name><your−program−name>.py
要执行 Python 程序,必须键入
在 [ ] 中:
python <your_program_name>.py
另外,要执行前面的命令,请记住您必须位于 Python 程序所在的同一目录下。
1.3 您将从本课程中学到什么?
在上面的代码中,您已经应用了本课程要学习的许多 Python 概念:
如何将数据存储到变量中
如何操作变量中的数据
如何根据条件改变行为
如何创建可在代码其他地方调用的方法
如何将代码封装到类中,从而获得简洁、健壮的代码
1.4 你将如何学习这一切?
从第一天起,您就可以通过亲身体验来学习!在机器人点火学院,我们坚信最好的学习方法就是练习、练习,然后......再练习!
由于这是一门 Python 课程,我们将把重点放在编程语言上,而将机器人技术放在一边。在课程中,您还可以与模拟环境进行交互。具体来说,您将学习以下内容
高峰 XL
库珀

机器人手臂黑蜂蜜
1.5 课程要求:
课程要求
为了能够完全理解本课程的内容,您需要知道如何使用 Linux 终端(就像您在演示 1.1 中所做的那样)。如果您不了解演示 1.1中的命令和语言,那么在学习本课程之前,您需要学习以下课程:

说真的,如果你不知道 Linux 终端是如何工作的,你就会在接下来的章节中迷失方向。所以,如果这是你想要的,那就去做吧。我们在这里等着你!
1.6 结论
在第一课中,你已经学会了如何创建 Python 程序,以及如何执行该程序来控制机械臂。现在,让我们进入下一课,真正理解 Python 语法以及如何为机器人创建复杂的程序。
1.7 单元测验
当从课程中的一个单元转到下一个单元时,您可能会看到以下窗口或类似窗口,并出现一个测验:
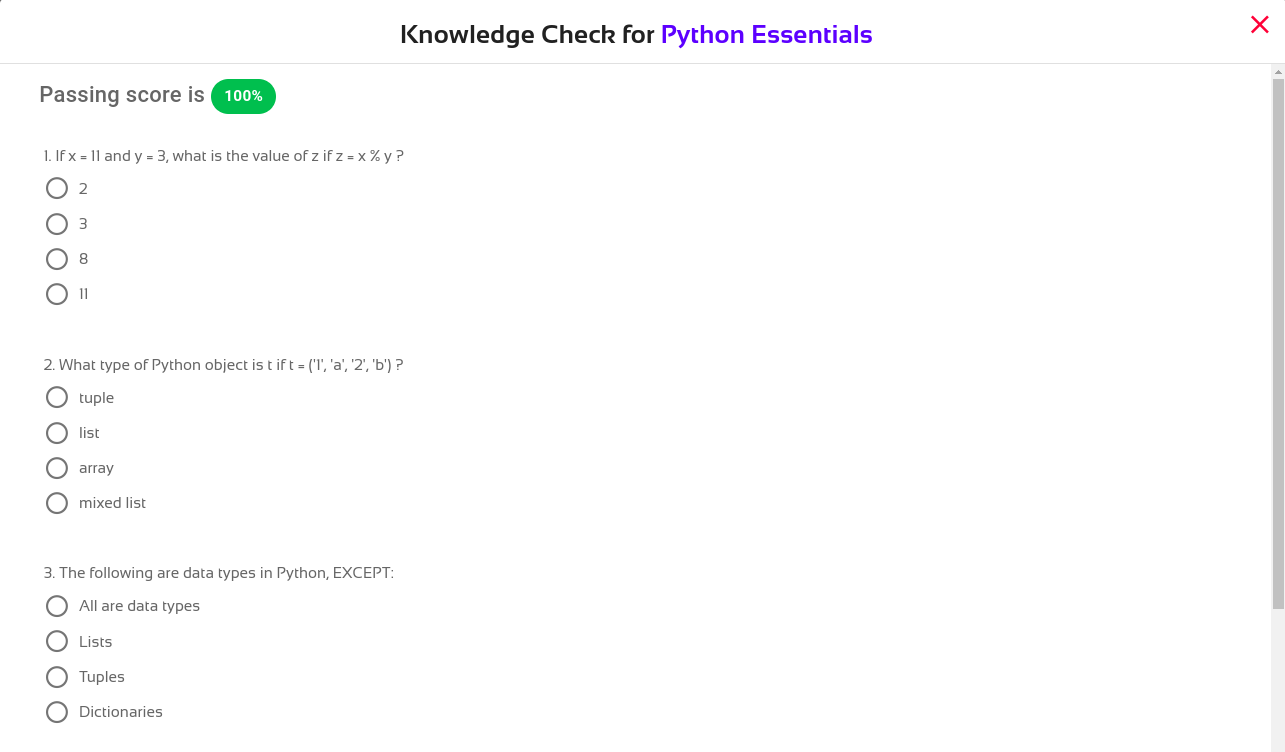
如果由于某种原因没有显示,请告诉我们,我们会解决这个问题。
终于,你们期待已久的激动人心的消息来了!
完成本课程后,您可以获得Python技能认证。如本单元开头所述,您将有机会在ROS框架上运行的真实机器人上工作。按照项目描述中给出的说明,将所学的Python技能应用到真实机器人上。完成项目后,您将获得证书!

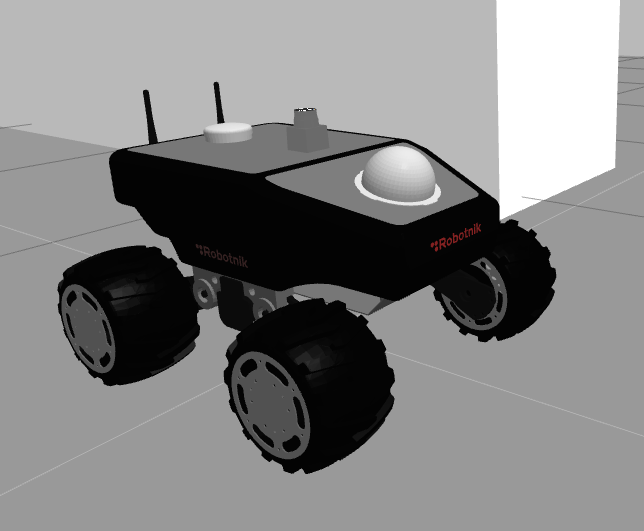
1.8 真正的机器人乌龟机器人3
在学习本课程的过程中,我们会在某些单元结束时为您提供必要的指导,帮助您操作下图所示的真实机器人TurtleBot3。请按照指示完成任务,这样您就可以在学习本课程的同时完成最终课程项目的一部分。


1.9 特别感谢
如果没有以下人员的工作,本课程就不可能完成:
, XL 机器人和模拟器的创造者。
![]()
所用 3D 模型的创建者:
当然,我们还要感谢整个做的一切工作,是他们让我们能够为你打造这门课程。我们的课程站在巨人的肩膀上!
评论